Вопросы уравновешивания стоят при разработке любого привода, как кривошипного, так
и инерционного, т. к. неуравновешенные силы вызывают:
- преждевременное разрушение механизмов и узлов машины;
- отрицательное влияние на целостность фундаментов, перекрытий и других строительных конструкций;
- отрицательное влияние на здоровье человека.
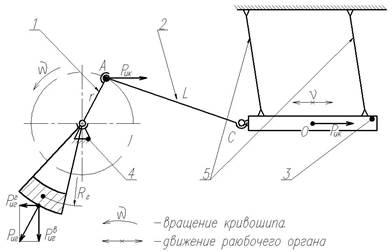
При использовании кривошипно-шатунного привода возникает сила инерции кузова Рин, переменная по величине и направлению. Эта сила зависит от скорости движения и массы кузо-ва с продуктом. Реакция от нее передается на подшипниковые узлы, затем – на станины, осно-вания, строительные конструкции. Это приводит к повышенному износу подшипниковых уз-лов, разрушению станины, строительных конструкций. Для уменьшения (исключения) отри-цательного влияния возникающих вибраций применяют уравновешивание. При кривошипно-шатунном приводе используют, как правило, два способа:
уравновешивание посредством вращающихся грузов; уравновешивание аналогичными рабочими органами (кузовами).
Уравновешивание посредством вращающихся грузов. Если r<<L,то равнодейст-
| вующая сил инерции поступательно- | |||||
| го движения кузова, которую примем | |||||
| сосредоточенной в точке О (рисунок | |||||
| 4.4)определяется формулой: | |||||
| РИК | m 2 r sin. | (4.41) | |||
| Перенесем силу инерции кузова | |||||
| в цапфу кривошипа, точку А, (рису- | |||||
| нок 4.5). | |||||
| Как видно из рисунка 4.5, силы | |||||
| инерции кузова будут уравновеши- | |||||
| ваться горизонтальной составляющей | |||||
| силы инерции грузов РИГГ: | |||||
| РИГГ РИГ sin | (4.42) | ||||
| , | 1 – кривошип; 2 – шатун; 3 – кузов (рабочий орган), | ||||
| MГ 2 RГ sin | |||||
| где Мг и Rг, соответственно масса и | 4 – опора кривошипа; 5 – подвеска | ||||
| радиус вращения центра масс груза. | Рисунок 4.5 – Совмещенная кинематическая и силовая | ||||
| Для | полного уравновешивания | схема уравновешенного кривошипного колебателя | |||
| РИК РИГГ т.е. | машины | ||||
| MГ 2 | RГ sin m 2 r sin, | (4.43) | |||
| отсюда МГ m r / RГ. | (4.44) |
 Однако при уравновешивании вращающимся грузом неизбежно возникает вертикальная составляющая силы инерции грузов РИГВ, которая достигает наибольшей величины при верти-кальном расположении грузов. Для избегания значительных неуравновешенных сил в верти-кальной плоскости массу вращающихся грузов берут 60 % от расчётной.
Однако при уравновешивании вращающимся грузом неизбежно возникает вертикальная составляющая силы инерции грузов РИГВ, которая достигает наибольшей величины при верти-кальном расположении грузов. Для избегания значительных неуравновешенных сил в верти-кальной плоскости массу вращающихся грузов берут 60 % от расчётной.
Расчёт и конструирование машин и аппаратов пищевых производств. Элементы теории и сборник задач Расчёт кинематических параметров кривошипных приводов

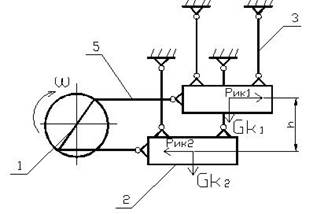
| Уравновешивание кузовами. При | ||||
| уравновешивании кузовами на практике | ||||
| используют две схемы (рисунок 4.6 и 4.7). | ||||
| При уравновешивании с использованием | ||||
| схемы (рисунок 4.7) при r<<L, G1=G2 и | ||||
| X1=Х 2 | смещение центра масс Хс=0, т. е. | |||
| обеспечивается полное уравновешивание. | ||||
| Однако на практике достичь равенства | ||||
| масс кузовов (особенно нагруженных | ||||
| продуктами) не просто. Кроме того, ма- | ||||
| шины, выполненные по этой схеме, отли- | ||||
| чаются громоздкостью, | неудобством в | 1 – кривошип; 2 – колеблющийся орган; | ||
| обслуживании привода (из-за труднодос- | ||||
| 3 – подвеска; 5 – шатун | ||||
| тупности) и требуют большого количе- | ||||
| Рисунок 4.6 – Схема уравновешивания | ||||
| ства | приемно-питающих | и выпускных | ||
| устройств. | колеблющихся масс рабочими органами | |||
| Достичь полного | уравновешива- | (кузовами), движущихся в противофазе |
ния, используя схему (рисунок 4.6), не-
возможно, т. к. при этом появляется пара сил с плечом h, однако из-за компактности (в плане) такие машины получили широкое распространение. Недостатком схемы, показанной на рисунке 4.7, является необходимость расположения привода на одном из подвижных кузо-вов.

Рисунок 4.7 – Схема уравновешивания колеблющихся масс рабочими органами (кузовами), движущихся в противофазе
Расчёт и конструирование машин и аппаратов пищевых производств. Элементы теории и сборник задач Расчёт кинематических параметров кривошипных приводов
Пример расчёта