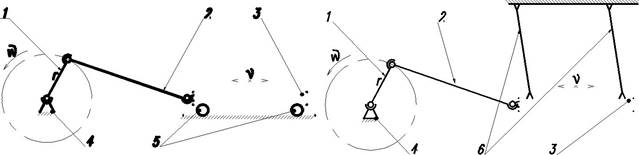
В пищевой промышленности, при использовании кривошипного механизма, крепление рабочего органа (ползуна) к неподвижным опорам чаще всего осуществляется с помощью опор (роликов) или подвесок (рисунок 4.3 а, б).
| а) | б) | |||||||||||||||||||||||||||||||||||||||||
| 1 – кривошип; 2 – шатун; 3 – рабочий орган, 4 | – опора кривошипа; 5 – направляющие | |||||||||||||||||||||||||||||||||||||||||
| ролики (опоры); 6 | – подвеска |






Рисунок 4.3 – Принципиальная кинематическая схема кривошипных механизмов используемых в пищевой промышленности
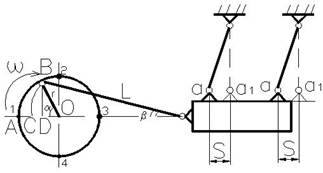
Для аналитического определения пути, скорости и ускорения рабочего органа остано-вим кривошип, движущийся из точки 1 по часовой стрелке в произвольной точке В (рису-
нок 4.4).
Расчёт и конструирование машин и аппаратов пищевых производств. Элементы теории и сборник задач Расчёт кинематических параметров кривошипных приводов

Путь, пройденный ситом S из точки а в точку а1, выразим через угол поворота кри-вошипа и его длину r:
| S aa 1 AC AD CD r (1 cos) L (1 cos), | (4.32) |
где r – радиус кривошипа; L – длина ша-туна.
Исключим из полученного выражения угол. Для этого составим уравнение:
| BD r sin L sin, | (4.33) | ||||||||
| откуда sin (r / L) sin, | (4.34) | ||||||||
| cos 1 sin2 1 (r sin / L)2, | (4.35) | ||||||||
| S r (1 cos) L (1 1 ( | r | sin)2). (4.36) | |||||||
| L | |||||||||


Рисунок 4.4 – Схема для определения кинематических характеристик колеблющегося рабочего органа при кривошипно-шатунном приводе
Разложим подкоренное выражение в ряд Тейлора:
| 0,5 | ||||||||||||
| l r sin | L | l | r sin L l | r sin | L... | (4.37) | ||||||
 Для современных технологических машин r
Для современных технологических машин r  L 0,02,тогда ряд Тейлора преобразуетсяв следующую цифровую цепочку:
L 0,02,тогда ряд Тейлора преобразуетсяв следующую цифровую цепочку:
1-0,0002-0,00000002-.... 1. Следовательно,с достаточной точностью можно записать:
| S r (1 cos) r (1 cos t), | (4.38) |
т. е. рабочий орган движется по гармоническому закону.
Из выражения (4.38) следует, что Sm 2 r.
Дифференцируя (4.38) по времени t, получим выражение для определения скорости си-
| та в любой момент времени: | |
| a dS / dt r sin t. | (4.39) |
| Ускорение сита а можно найти, взяв вторую производную из выражения (4.38): | |
| a d 2 S / dt 2 2 r cos t. | (4.40) |
| Полученные результаты верны при следующих допущениях: |
- в условиях применения кривошипно-шатунного привода амплитуда колебаний не зависит от частоты колебаний и жесткости подвесок;
- при теоретических исследованиях сделаны следующие допущения:
o длина шатуна много больше радиуса кривошипа L»r;
o дуга а-а1 – прямая;
o система абсолютно жесткая.
Расчёт и конструирование машин и аппаратов пищевых производств. Элементы теории и сборник задач Расчёт кинематических параметров кривошипных приводов