Рассчитаем динамические параметры АД. Индуктивности от главного магнитного потока Lm и потоков рассеяния Lsl и Lrl рассчитываются по
 ;
;  ;
;  ;
;
где  ;
;
ωs – номинальная электрическая частота питания статора, рад/сек;
 ;
;
 ;
;
 ;;
;;
Коэффициенты связи ротора и статора определяются как:
 ,
,
где, Гн;

 ;
;
 ,
,
где, Гн;

 .
.
Результирующий коэффициент рассеяния (σ) и постоянные времени, Tr и Tsr, с, рассчитываются по формулам:
 ;
;
 ;
;
 ;
;
где  , Ом;
, Ом;

 ;
;
 ;
;
 .
.
Номинальное скольжение, sн, определяется:
 , (20)
, (20)
где ns – синхронная скорость (скорость вращения магнитного поля), определяемая как:
 . (21)
. (21)
 ;
;
 .
.
Потокосцепление статора и ротора рассчитываются по формулам:
 , (22)
, (22)
 ;
;
 , (23)
, (23)
 .
.
Система векторного управления имеет два канала:
· канал регулирования момента, в котором контур регулирования активной составляющей тока статора isq подчинен контуру регулирования скорости;
· канал регулирования потокосцепления ротора, в котором контур регулирования реактивной составляющей тока статора isd подчинен контуру регулирования потокосцепления ψr.
Для придания системе требуемых качеств, необходимо синтезировать регуляторы как в канале регулирования (стабилизации) потока, так и в канале регулирования скорости.
При питании АД от автономного инвертора напряжения не удается синтезировать регуляторы классическим способом вследствие того, что в этом случае сильное влияние на динамику системы оказывают перекрестные связи [5], [7].
Современные системы векторного управления АД, выпускаемые ведущими электротехническими фирмами, строятся на базе программируемого микропроцессорного управления и являются цифровыми. Однако они могут быть представлены своим аналоговым вариантом. Структурная схема такого ЭП показана на рис.9.

Рисунок 9 – Структурная схема системы векторного управления с компенсацией перекрестных обратных связей объекта управления
На схеме рис.9 обозначено:
1 – сигнал задания скорости, Uзс=10В;
2 – момент сопротивления, равный номинальному моменту двигателя, Мс=Мн;
3 – сигнал задания потокосцепления ротора Uψr0=10В.
Расчет регуляторов
Преобразователь частоты в виде АИН будем представлять как реальное апериодическое звено.
Малую некомпенсируемую постоянную времени преобразователя частоты (ПЧ) принимаем равной Тμ=0,002 с. Таким образом, передаточная функция ПЧ будет иметь вид:
 , (24)
, (24)
где Кпч=38 – коэффициент усиления преобразователя по напряжению.
Определим передаточные функции регуляторов.
Принцип подчиненного регулирования основан на том, что все регуляторы должны скомпенсировать постоянные времени, имеющиеся в объекте регулирования. Кроме того, в коэффициентах усиления регуляторов необходимо учесть все коэффициенты усиления объекта.
В канале регулирования скорости выбираем пропорциональный регулятор скорости (РС), а в канале регулирования потока – пропорционально-интегральный регулятор потока ψr (РП).
Внутренние контура токов
Настройка на модульный оптимум (МО) внутренних токовых контуров обеспечивается пропорционально-интегральными (ПИ) – регуляторами составляющих тока isd и isq ПИ-РТd, ПИ-РТq с передаточной функцией:
 , (25)
, (25)
где  – коэффициент усиления регулятора тока;
– коэффициент усиления регулятора тока;
 ;
;
 – постоянная времени регулятора тока, с;
– постоянная времени регулятора тока, с;
 ;
;
 ;
;
 .
.
Такие регуляторы активного и реактивного тока (25) полностью компенсируют инерционность объекта управления и имеют идентичные передаточные функции.
Контур потокосцепления ротора
Для обеспечения стабилизации потока (т.е. поддержания его на постоянном уровне) синтезируется ПИ-регулятор потока. Передаточная функция которого будет иметь вид:
 , (26)
, (26)
где  – коэффициент усиления регулятора потока;
– коэффициент усиления регулятора потока;
 ;
;
 ;
;
 – коэффициент усиления датчика потока;
– коэффициент усиления датчика потока;
 – постоянная времени регулятора потока, с;
– постоянная времени регулятора потока, с;
 ;
;
 ;
;
 .
.
Канал регулирования потока является астатическим 1-го порядка, таким образом, в нем будет отсутствовать ошибка по задающему сигналу.
Контур скорости
Для настройки контура скорости достаточно взять пропорциональный (П) – регулятор скорости П – РС с передаточной функцией:
 , (27)
, (27)
где  – постоянная времени регулятора скорости, с.
– постоянная времени регулятора скорости, с.
Коэффициент усиления датчика скорости рассчитывается из условия задания величины управляющего напряжения в канале регулирования скорости. Принимается Uзс=10В. Исходя из этого определяется коэффициент усиления обратной связи по скорости:
 ,
,
где  ;
;
 ;
;
 ;
;
 .
.
Канал регулирования скорости является однократноинтегрирующим. Таким образом, в системе при набросе нагрузки имеется просадка скорости (статическая ошибка).
Задание на вход системы подается через задатчик интенсивности (ЗИ). Необходимо рассчитать его постоянную времени Тзи по соотношению:
 , (28)
, (28)
где время разгона электропривода  , (29)
, (29)

 ;
;
 ;
;
Пуск от ЗИ осуществляется для возможности обеспечения постоянного ускорения, а также для избежания интенсивных колебаний момента и тока, которые будут наблюдаться при прямом пуске.
Задание на систему подается с задержкой 0,05 с. это необходимо для того, чтобы поток в двигателе вышел на номинальное значение.
В объекте управления (АД) имеются перекрестные связи, которые оказывают существенное влияние на динамику ЭП. В переходных режимах наблюдается значительная колебательность и просадка скорости. Следовательно, эти связи необходимо скомпенсировать. Для этого сигналы Ukd и Ukq подаются на вход звеньев, описывающих преобразователь частоты в канале реактивного и в канале активного токов соответственно.
С помощью преобразователей координат, которые составляют исполнительную часть системы, из вращающейся системы координат dq в неподвижную αβ (рис.12) и из двухфазной αβ в трехфазную А, В, С (рис.13) можно получить реальные токи в фазах двигателя [7].
Преобразователь из вращающейся системы координат dq в неподвижную αβ можно реализовать на основании уравнения:
 . (30)
. (30)
Преобразователь из неподвижной ортогональной двухфазной системы координат в трехфазную можно реализовать на основании уравнений:
 (31)
(31)
Переходные процессы

Рисунок 1 – Скорость АД и момент АД при набросе номинальной нагрузки в осях α и β.

Рисунок 2 – Скорость АД и момент АД при набросе номинальной нагрузки в осях x и y.
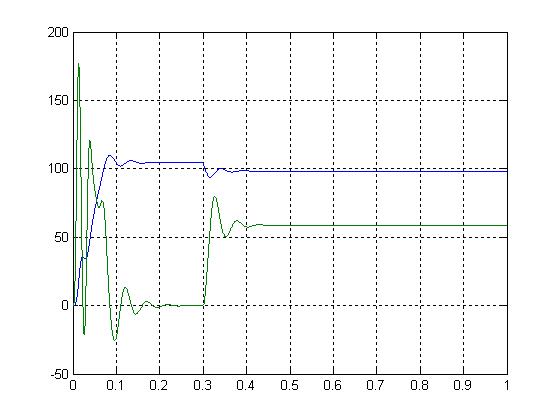
Рисунок 3 – Скорость АД и момент АД при набросе номинальной нагрузки в осях d и q.

Рисунок 4 – Переходные процессы ω и М в АД во вращающейся системе координат при М с = М н

Рисунок 5 - Разгон на холостом ходу с набросом нагрузки при t =0,3c
с учетом всех перекрестных связей и ОС по ЭДС

Рисунок 6 - Разгон с набросом нагрузки во время разгона с учетом всех
перекрестных связей и ОС по ЭДС
.

Рисунок 7 - Разгон на холостом ходу с набросом нагрузки
при t =0,3c без учета всех ОС

Рисунок 8 - Разгон с набросом нагрузки во время разгона
без учета всех ОС

Рисунок П 9 - Разгон на холостом ходу с набросом нагрузки при t =0,3c без учета перекрестных связей, но с учетом ОС по ЭДС

Рисунок 10 - Разгон с набросом нагрузки во время разгона без учета
перекрестных связей, но с учетом ОС по ЭДС
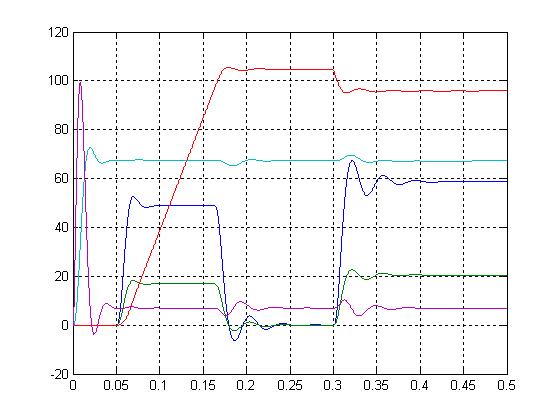
Рисунок 11 - Разгон на холостом ходу с набросом нагрузки при t =0,3c
без учета ОС по ЭДС, но с учетом перекрестных связей

Рисунок 12 - Разгон с набросом нагрузки во время разгона без учета ОС по ЭДС, но с учетом перекрестных связей

Рисунок 13 - Разгон на холостом ходу с набросом нагрузки при t =0,3c
с компенсацией перекрестных связей

Рисунок 14 - Разгон при набросе нагрузки во время разгона с
компенсацией перекрестных связей
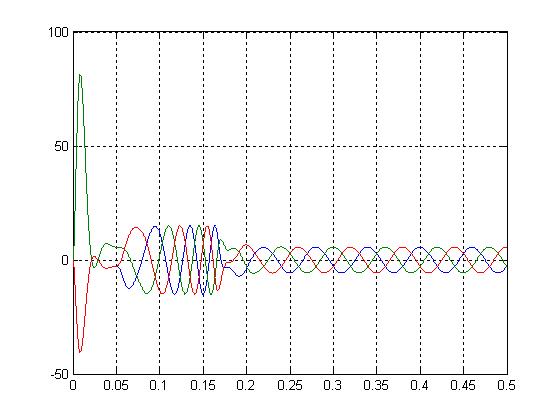
Рис.25 – Трехфазные токи при пуске от ЗИ на холостом ходу
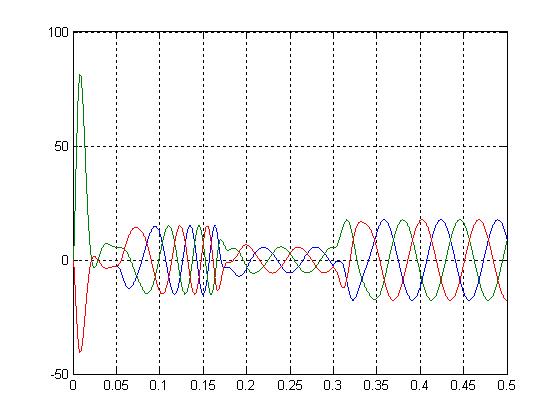
Рис.26– Трехфазные токи при пуске от ЗИ под нагрузкой
Заключение
В ходе курсового проекта был произведен расчет параметров заданного асинхронного двигателя с короткозамкнутым ротором. Также выполнен расчет (синтез) регуляторов в контурах токов, напряжения, потокосцепления ротора и скорости.
При помощи пакета Matlab была составлена и промоделирована структурная схема системы векторного управления в системе координат ориентированной по потокосцеплению ротора и схема преобразователя из двухфазной системы координат в трёхфазную. Полученные процессы представлены на рисунках 10 – 26.
Анализ переходных процессов показывает, что перекрестные связи оказывают существенное отрицательное влияние на динамику системы (появляется колебательность) (рис.19 – 21). Компенсация же этих связей, осуществляемая при помощи обратной связи по напряжению перекрестных связей устраняет эти недостатки (рис.22 – 24).
Так как регулятор скорости реализован как пропорциональный, то при подаче нагрузки появляется просадка скорости (рис. 15, 20, 21, 24). Этого можно избежать, применив ПИ-регулятор, или, что и делают в современных системах векторного управления, ПИД-регулятор скорости, что обеспечит не только статическую точность, но и высокую скорость регулирования.