ТММ (Курс лекций): Часть I
Литература: (основная)
1. И.И. Артоболевский «Теория механизмов», Москва, Наука, 1967
2. С.А. Попов «Курсовое проектирование по теории механизмов», Москва, Высшая школа, 1986 г.
3. А.С. Кореняко, «КП по ТММ»
Лекция №1
Задача предмета:
1. Синтез, исследование и оптимизация механизмов и машин.
Цели издания машины:
1. Уменьшение себестоимости машины
2. Уменьшение себестоимости продукции
3. Увеличение производительности
4. Увеличение качества
Машина – это устройство созданное человеком для использования законов природы в целях облегчения умственного и физического труда.
Механизм – это система тел, предназначенных для преобразования движения одних тел в требуемое движение других.
Классификация механизмов:
1.По функциональному назначению.
- Механизмы двигательные и преобразовательные
Преобразовывают потенциальную энергию топлива в кинетическую энергию.
- Передаточные механизмы
Передача и преобразование кинетической энергии
Примеры
- Исполнительные механизмы
Воздействуют на окружающую среду
- Механизмы управления, контроля и регулирования (регулятор Уатта)
|



 ЭВМ
ЭВМ




ТММ как наука:
 структурный
структурный
 Проблемы: 1. Анализ механизмов кинематический
Проблемы: 1. Анализ механизмов кинематический
 динамический
динамический
 синтез
синтез
 2. Синтез и оптимизация механизмов оптимизация
2. Синтез и оптимизация механизмов оптимизация
 Основные понятия:
Основные понятия:

 Кинематическая связь – взаимодействие деталей в механизме, подчиняющиеся закономерности.
Кинематическая связь – взаимодействие деталей в механизме, подчиняющиеся закономерности.
 Жесткая Гибкая
Жесткая Гибкая
 Закон взаимодействия В законе взаимодействия
Закон взаимодействия В законе взаимодействия
 не меняется от внешних присутствуют внешние
не меняется от внешних присутствуют внешние
воздействий воздействия
J = J(D1, D2, D3…) J = J(D1, D2…; T)
Di – законы взаимодействия T – внешние воздействия
между пром. деталями
Кинематическая пара – это соединение двух соприкасающихся тел, допускающее их относительное движение.
 Условное обозначение кинематических пар.
Условное обозначение кинематических пар.
1. Шарниры обозначают буквами латинского алфавита
2. Звенья – арабскими цифрами
Пример:
| Число степеней свободы W | Наименование кинематической пары | Обозначение и код | Условное графическое обозначение |
| Вращательная Поступательная Винтовая | 1в [100] 1п [010] 1вп [001] | 



| |
| Цилиндрическая Сферическая с пальцем | 2ц [110] 2сп [200] | 

| |
| Сферическая Плоскостная | 3с [300] 3пл [120] | 

| |
| Линейная Сфера-цилиндр | 4л [220] 4сц [310] | 
| |
| Точечная | 5 т[320] | 
|
 Кинематическая цепь – это, система кинематических пар, образующих кинематическую цепь.
Кинематическая цепь – это, система кинематических пар, образующих кинематическую цепь.
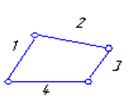
Замкнутая кинематическая цепь:

Разомкнутая кинематическая цепь:
Кинематические пары: 1 - 2, 2 - 3, 3 - 4, 4 - 1.
Новое определение механизма:
Механизм – это кинематическая цепь звенья которой осуществляют целесообразные закономерные движения, необходимые для выполнения работы.
|
|

|






 Основные виды механизмов
Основные виды механизмов 
1. Рычажные механизмы:
Применение: ДВС, системы управления и т. д.
 А) Простейший рычажный механизм (двухзвенный)
А) Простейший рычажный механизм (двухзвенный)
1- стойка
 2- кривошип
2- кривошип
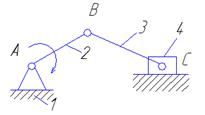
Б) Трехзвенный (ДВС)
 3 – ползун
3 – ползун
В) Четырехзвенный механизм
Пример:
1)Месильная машина

2)Шарнирный антипаралеллограм

Кулисные механизмы

4- кулиса (направляющая)
Пример: Кулисный механизм строгального станка

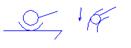
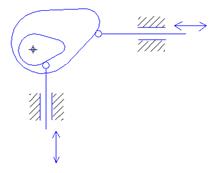
Кулачковые механизмы
Применение: Преобразование вращательного движения в поступательное или вращательное с определенным законом, определяющимся контуром кулачка (распределительный вал ДВС).
Пружина – обеспечивает силовое замыкание кинематической пары кулачок – толкатель.
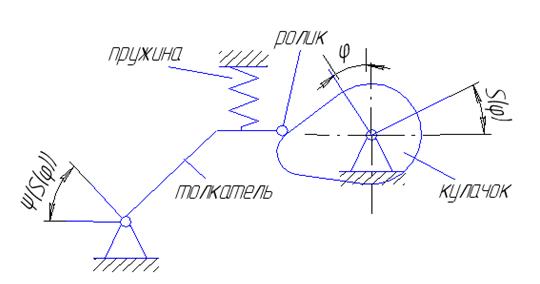
Разновидности кулачков:
А) Простые

 Б) Цилиндрические
Б) Цилиндрические
В) Двухпрофильные
Зубчатые механизмы.
Применение: Преобразование вращательного движения.

 Зубчатые механизмы
Зубчатые механизмы
 |  | ||||||
|
| ||||||
Цилиндрические
1.С внешним зацеплением 1.Простые


2.С реечным зацеплением 2.Дифференциальные


|


4.С некруглым зацеплением
|
|


Клиновые и винтовые механизмы
Применение: Преобразование движения
Простой клиновой механизм:

Винтовой механизм:

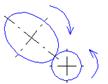
6.Фрикционные механизмы (Пояснить)
Применение: Вариаторы!

Механизм бесступенчатого переключателя скоростей:
