Дискретно-непрерывные системы включают элементы как дискретных, так и непрерывных систем. Именно такое сочетание элементов наиболее характерно для большинства технологических процессов с дискретным (цифровым управлением) и при математическом описании систем необходимо учитывать возможности дискретной аппроксимации сигналов и звеньев. Действительно, при достаточно больших тактах дискретного управления тот же электродвигатель не может быть представлен дискретным звеном, поскольку его дискретная модель будет противоречить теореме Котельникова-Шеннона.
Математические модели дискретно-непрерывных систем в контексте современной теории управления представляют либо в виде схем пространства состояний, либо в виде векторно-матричных разностных уравнений.
Рассмотрим пример составления схемы пространства состояний дискретно-непрерывной системы управления электродвигателем постоянного тока. Пусть электродвигатель с силовым преобразователем представлен непрерывным звеном 2-го порядка (см. в гл. 8.3)
 . (10.21)
. (10.21)
Установим на вход объекта дискретный регулятор, реализующий ПИ-закон регулирования, с передаточной функцией
 . (10.22)
. (10.22)
Коэффициент передачи звена отрицательной обратной связи по скорости примем равным 0,1.
Схема пространства состояния объекта управления приведена на рис. 10.10, а схема моделирования замкнутой дискретно-непрерывной САУ в среде Simulink - на рис. 10.11. Для упрощения модели объект управления на этой схеме представлен передаточной функцией вида (10.21).

Рис. 10.10. Схема пространства состояний объекта управления
Для преобразования дискретного сигнала управления U у(z) в непрерывный сигнал U у(p) между регулятором и объектом управления включен экстраполятор нулевого порядка (Zero-Order Hold). Примем такт квантования T = 0,05с.
При математическом описании дискретно-непрерывных систем следует различать два момента:
1) в моменты квантования (замыкания ключей) изменяется состояние только дискретной части системы; непрерывная часть, обладая инерцией, остается неизменной;
2) в промежутках времени между замыканиями ключей происходит изменение только непрерывной части системы; дискретная часть, благодаря фиксаторам, остается неизменной.
Введем обозначения переменных состояния (см. рис. 10.10, 10.11):
r – задающее воздействие;
x 1 – скорость двигателя;
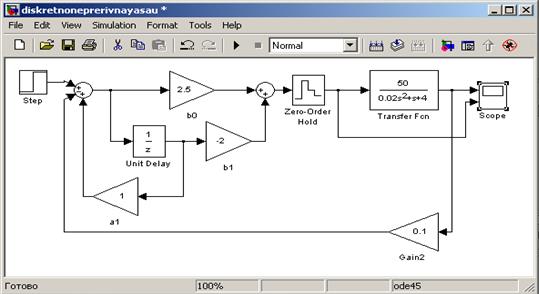
Рис. 10.11. Схема моделирования замкнутой дискретно-непрерывной
системы
x 2 – ток якоря;
x 3 – выходной сигнал звена задержки в работе регулятора на такт T.
Введем расширенный вектор состояния
 .
.
Переменные состояния в дискретные моменты времени замыкания ключей:
 ,
,
 ,
,
 ,
,
 .
.
Модель дискретной части системы в векторно-матричной форме:
 , (10.23)
, (10.23)
где S – матрица ключей,
 .
.
Переменные состояния между моментами времени замыкания ключей:
 ,
,
 ,
,

 .
.
Векторно-матричная модель дискретно-непрерывной системы в промежутках времени между замыканиями ключей
 , (10.24)
, (10.24)
где  - расширенная матрица состояния системы,
- расширенная матрица состояния системы,
 .
.
На основе уравнений (10.23), (10.24) состояния дискретно-непрерывной САУ можно получить уравнение ее движения в функции времени (уравнение переходных состояний). Для этого, прежде всего, необходимо в соответствие с формулой (8.13) найти матрицу перехода  для непрерывной системы.
для непрерывной системы.
Пусть дано начальное состояние системы  . Тогда в начальный момент времени t = 0 и на интервале времени от t = 0 до t = T
. Тогда в начальный момент времени t = 0 и на интервале времени от t = 0 до t = T
 ,
,

где H(A, T ) – матрица переходных состояний дискретно-непрерывной системы, H(A, T ) = Ф(A, T ) S.
Рассуждая аналогично, можно записать уравнение переходных состояний для произвольного числа тактов квантования:
 . (10.25)
. (10.25)
На рис. 10.12 приведен переходный процесс в рассматриваемой дискретно-непрерывной системе управления электроприводом. Как видим, скорость электропривода в режиме малых отклонений координат устанавливается с небольшим колебанием примерно за 6 тактов квантования (0,3 с), что является вполне приемлемым для большинства технических приложений, однако может оказаться неприемлемым для систем предельного быстродействия.
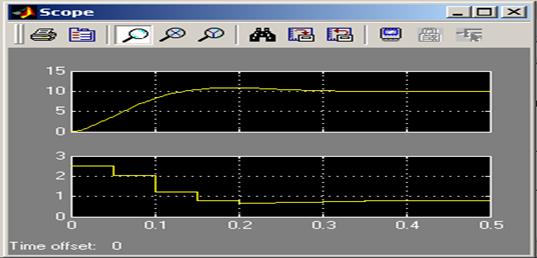
Рис. 10.12. Переходный процесс в дискретно-непрерывной
системе управления электроприводом
Ниже будут рассмотрены некоторые методы синтеза оптимальных цифровых САУ.
10.3. Синтез цифровых систем управления
Существует достаточно большое множество методов синтеза цифровых систем управления, основанных на описании управляемых динамических процессов, как в частотной области, так и во временной области [6, 10, 11, 18, 19, 24, 27].
Для синтеза цифровых САУ применяют, в частности:
- метод дискретизации по времени аналоговых регуляторов класса “вход/выход” (метод аналогий) или метод билинейного преобразования;
- метод переменного коэффициента усиления;
- методы аналитического конструирования дискретных регуляторов состояния САУ.
10.3.1. Метод дискретизации аналоговых регуляторов
Данный метод основан на применении рассмотренных выше процедур синтеза линейных аналоговых САУ. В качестве критериев оптимальности принимают общепринятые при синтезе таких систем интегральные квадратичные функционалы, а, следовательно, динамические процессы в оптимизированных контурах регулирования соответствуют реакциям тех или иных оптимальных фильтров, например фильтров Баттерворта n -го порядка. Синтезированное аналоговое устройство управления содержит, как правило, один или несколько последовательно включенных регуляторов (корректирующих устройств) класса “вход/выход”.
Суть метода заключается в замене передаточных функций синтезированных непрерывных регуляторов их дискретными аналогами. Отсюда и второе название данного метода синтеза – метод аналогий.
Для преобразования аналоговых передаточных функций регуляторов в дискретные применяют замену непрерывного оператора p Лапласа его дискретным аналогом z = f (p). В качестве примера рассмотрим дискретизацию непрерывного ПИД-закона регулирования. Процедура преобразования иллюстрируется рис. 10.13.

Рис. 10.13. Преобразование непрерывного ПИД-регулятора
в его дискретный аналог
Входным воздействием регулятора является ошибка регулирования (e (t) для непрерывного и e (kT) для дискретного регулятора), выходным – сигнал управления (u (t) для непрерывного и u (kT) для дискретного).
Приведенное преобразование основано на замене:
 (10.26)
(10.26)
- при формировании интегральной составляющей ПИД–закона регулирования;
 (10.27)
(10.27)
- при формировании дифференциальной составляющей ПИД–закона регулирования.
Заметим, что с целью обеспечения точности отработки интеграла от ошибки регулирования при замене оператора p на z применена экстраполяция первого порядка (метод трапеций). Следует отметить, что метод билинейного преобразования, по сути, сводится к применению именно метода трапеций.
Параметры К рег, К и, К Д получены в результате синтеза аналогового ПИД- регулятора, Т – временной интервал между двумя соседними значениями управляющего воздействия (такт управления).
Применение этого метода синтеза предполагает, что дискретизацией аналоговых сигналов по уровню в силу достаточной длины разрядной сетки цифровых средств управления можно пренебречь, а такт управления достаточно мал (как правило, на порядок меньше минимальной постоянной времени объекта управления). Также предполагается, что периоды прерывания Т импульсного элемента датчиков обратной связи и регуляторов одинаковы и неизменны, причем синхронизированы во времени. Как показывают исследования [18, 24] в цифровых электромеханических САУ такт прерывания должен составлять (0,005…0,05)с. Обеспечение этих условий позволяет получить динамические характеристики цифровой САУ практически такие же, что и в непрерывной системе.
10.3.2. Метод переменного коэффициента усиления
В основе метода лежат теорема об n интервалах дискретного управления и применение дискретных уравнений переходных состояний [11, 19, 24]. Дискретный регулятор на начальном этапе синтеза представляется в виде последовательной цепочки, состоящей из квантователя ошибки e (t) регулирования по времени с тактом T, фиксатора Ф нулевого порядка и безынерционного звена с переменным коэффициентом Кj усиления (рис. 10.14).

Рис. 10.14. Структура дискретного
регулятора на начальном
этапе синтеза
Входным воздействием регулятора является ошибка регулирования e (kT), выходным – сигнал управления u (kT). Ошибка регулирования e (kT) на входе звена с переменным коэффициентом усиления Kj фиксируется с помощью экстраполятора нулевого порядка при каждом такте дискретизации Т.
В соответствие с теоремой об n интервалах дискретного управления система будет оптимальной по быстродействию (в концепции импульсных САУ), если переходные процессы в ней заканчиваются через n тактов управления, причем без перерегулирования выходной координаты, где n - порядок линейного объекта управления. Критерий оптимальности системы (максимум быстродействия) в этом случае записывается в виде t рег = nT  min. Цель синтеза – определение n значений коэффициентов Кj, обеспечивающих достижение предельного быстродействия САУ.
min. Цель синтеза – определение n значений коэффициентов Кj, обеспечивающих достижение предельного быстродействия САУ.
Для дискретной САУ с рассматриваемым регулятором можно записать n дискретных уравнений переходных состояний (10.21)
 (10.28)
(10.28)
где V (jT) – вектор состояния САУ на предыдущем такте управления;
 – вектор состояния на текущем такте управления после замыкания ключевых элементов (фиксации новых значений переменных состояния);
– вектор состояния на текущем такте управления после замыкания ключевых элементов (фиксации новых значений переменных состояния);
Ф (Кj, Т) – расширенная матрица перехода системы, зависящая от искомых коэффициентов Кj;
S (Kj) – матрица переключения импульсных элементов.
По истечении n тактов управления, соответствующих минимальному времени управления, выходная координата приравнивается заданному значению и составляется система уравнений:

 ,
,

…
 ,
,
где  - установившиеся значения переменных состояния, определяемые по схеме переменных состояния.
- установившиеся значения переменных состояния, определяемые по схеме переменных состояния.
В результате решения системы n неоднородных алгебраических уравнений находят численные значения коэффициентов Кj.
На заключительном этапе синтеза оптимальный регулятор представляют в виде дискретной передаточной функции
 . (10.29)
. (10.29)
В отличие от рассмотренного ранее метода синтеза такт управления
здесь выбирается исходя из ограничений ресурсов управления (чем меньше требуемое время регулирования, тем большими ресурсами управления должна обладать САУ).
К существенным недостаткам метода следует отнести довольно высокую чувствительность синтезированных САУ к вариациям параметров объекта управления и “чужим” аддитивным воздействиям. Например, система, оптимизированная по критерию быстродействия по задающим воздействиям, может оказаться далеко не оптимальной в смысле этого критерия при отработке возмущающих воздействий.
Литература
1. Автоматизация типовых технологических процессов и установок: Учебник для вузов / А.М. Корытин, Н.К. Петров, С.Н. Радимов, Н.К. Шапарев. – 2-е изд., перераб. и доп. – М.: Энергоатомиздат, 1988. – 432 с.
2. Алексеев А.А., Имаев Д. Х., Кузьмин Н.Н., Яковлев В.Б. Теория управления. Учеб.- СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 1999. – 435 с.
3. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-ние, 1982. – 392 с.
4. Вальков В. М., Вершин В. Е. Автоматизированные системы управления технологическими процессами. – СПб.: Политехника, 1991. - 269 с.
5. Гофман В. Э., Хоменко А. Д. Работа с базами данных в Delphi. – С.-Пб.: БХВ Петербург, 2001. – 656 с.
6. Дорф Р. Современные системы управления / Р. Дорф, Р. Бишоп. Пер. с англ. Б. И. Копылова. – М.: Лаборатория Базовых Знаний, 2002. – 832 с.
7. Дэбли Дж., Харман Т. Simulink 4. Секреты мастерства / Пер. с англ. М.Л. Симонова. – М.: БИНОМ. Лаборатория базовых знаний, 2003. – 403 с.
8. Дьяконов В. MathCAD 2001: Учебный курс. – СПБ.: Питер, 2001. – 624 с.
9. Известия РАН. Сер. «Теория и системы управления».
10. Изерман Р. Цифровые системы управления.- М.: Мир. 1988. – 506 с.
11. Куо Б. Теория и проектирование цифровых систем управления: Пер. с англ. – М.: Машиностроение, 1986. – 448 с.
12. Методы классической и современной теории автоматического управления: Учеб.: В 3 т. / ред. Егупов Н.Д., -М.: Изд-во МГТУ, 2000. –747 с.
13. Никифоров А. Д., Ковшов А. Н., Назаров Ю. Ф. Процессы управления объектами машиностроения. Учеб. пособие для вузов. – М.: Высш. шк., 2001. – 455 с.
14. Новицкий О.А., Блюмин А.М., Папушин В.В. Курсовое и дипломное проектирование по автоматизации предприятий: Учеб. пособие. – М.: Колос, 1992. – 207 с.
15. Основы автоматизации управления производством: Учеб. Пособие для студ. техн. Вузов / Макаров И.М., Евтихиев Н.Н., Дмитриев Н.Д. и др.; Под ред. И.М. Макарова. – М.: Высш. Школа, 1983. – 504 с.
16. Потемкин В.Г. Система MATLAB. Справочное пособие. – М.: Диалог-МИФИ, 1997. – 350 с.
17. Программно-информационные комплексы автоматизированных производственных систем / С.А. Клейменов, С.Н. Рябов, С.А. Барбашов, А.И. Павленко; Под ред. С.А. Клейменова. – М.: Высш. шк., 1990. – 224 с.
18. Синтез электромеханических приводов с цифровым управлением / Вейц В.Л., Вербовой П.Ф., Вольберг О.Л., Съянов А.М. – АН Украины. Ин-т электродинамики. Киев: Наук. Думка, 1991. – 232 с.
19. Справочник по теории автоматического управления / Под ред. А.А. Красовского. – М.: Наука. Гл. ред. физ.-мат. лит., 1987. – 712 с.
20. Теория автоматического управления: Учеб. для вузов / Брюханов В.Н., Косов М.Г., Протопопов С.П. и др. / Под ред. Соломенцев Ю.М. - М.: Высш. шк., 2000. - 268 с.
21. Теория автоматического управления: Учеб. пособие для вузов / Анхимюк В.Л., Опейко О.Ф., Михеев Н.Н. - Минск: Дизайн ПРО, 2000. – 351 с.
22. Фаронов В.В. Delphi 5. Руководство программиста. – М.: - “Нолидж”, 2001. – 616 с.
23. Фаронов В.В. Delphi 5. Учебный курс. – М.: “Нолидж”, 2001.- 608 с.
24. Цифровые системы управления электроприводами / Батоврин А.А., Дашевский П.Г., Лебедев В.Д. и др. – Л.: Энергия, 1977. – 256 с.
25. Hanselman, Duane C., and Littlefield, Bruce R., Mastering MATLAB 5: A Comprehensive Tutorial, Upper Saddle River, Prentice Hall, 1998, pp. 97-112.
26. Kuo, Benjamin C., Automatic Control Systems, Englewood Cliffs, NJ, Prentice Hall, 1995, pp. 226-230.
27. Kuo, Benjamin C., Automatic Control Systems, Englewood Cliffs, NJ, Prentice Hall, 1995, pp. 839-240.
28. ProSoft. Краткий каталог продукции 5.0. – М.: Прософт, 2000 г. – 208 с.
29. Shampine, Laurens F., and Reichelt, Mark W., “ The MATLAB ODE Suite ”, The MathWorks, Ink., Natick, MA, 1999.
30. Strum, Robert D, and Kirk, Donald E., Contemporary Linear Systems Using MATLAB, Pacific Grove, CA, Brooks/Cole, 2000.