Постановка задачи
Построить ЛАЧХ (линейную амплитудно-частотную характеристику) и ЛФЧХ (линейную фазово-частотную характеристику) звена, заданного с помощью передаточной функции
 .
.
Решение (Вариант 1)
Схема для снятия частотных характеристик в системе Simulink изображена на рис.3.7.
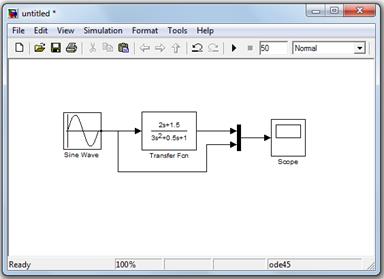
Рис.3.7. Первый вариант схемы моделирования для снятия частотных характеристик
Для сбора модели используются следующие блоки библиотеки Simulink:
Ø синусоидальный сигнал – библиотека Sources → Sine Wave;
Ø динамическое звено – библиотека Continuous → Transfer Fcn;
Ø мультиплексор – библиотека Commonly Used Bloks→Mux;
Ø виртуальные осциллографы – библиотека Sinks → Skope.
Параметры входного гармонического сигнала: амплитуда -  и угловая частота
и угловая частота 
задаются в блоке Sine Wave. Для расчетов амплитуду входного сигнала задаем равной единице.
Блок Mux предназначен для одновременного наблюдения на осциллографе входного и выходного сигналов.
Результат моделирования при  представлен на рис.3.8.
представлен на рис.3.8.
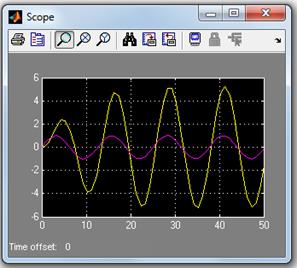
Рис. 3.8. Входной сигнал (розовая линия) и отклик системы (желтая линия)
На экране виртуального осциллографа в общем случае будет наблюдаться изображение (рис.3.9)

Рис.3.9
Решение (Вариант 2)
Для получения динамических характеристик системы (рис.3.8) можно воспользоваться функциями Linear Analysis пакета расширения Control System Toolbox. Для этого необходимо выставить метку Input Point щелкнув правой кнопкой мыши по стрелке перед блоком Transfer Fcn и набрать Linearization Points / Input Point. Аналогично выставляется метка Output Point (рис.3.10).

Рис.3.10. Второй вариант схемы моделирования для снятия частотных характеристик
Далее, набрав команду Tools / Control Design / Linear Analysis, открывается окно Control and Estimation Tools Manager

Рис. 3.11
Здесь обозначены расставленные на модели точки. Здесь можно поменять входы и выходы, а также деактивировать некоторые точки.
Далее нажимаем на кнопку Linearize Model и получаем окно с графическим отображением динамических характеристик (рис.3.12).

Рис.3.12 Переходной процесс
Для переключения между графиками нужно щелкнуть правой кнопкой мыши по графику и выбрать из подменю Plot Types/«необходимый график». Здесь « необходимый график » - одна из диаграмм:
- Step – реакция на единичный скачок;
- Impulse – импульсная характеристика;
- Bode, Bode Magnitude – диаграммы Боде;
- Nyquist – диаграмма Найквиста;
- Nichols - диаграмма Никольса (логарифмическая амплитудно-фазовая диаграмма);
- Pole/Zero – картанулей и полюсов.
На рис.3.13 - 3.14 в качестве примера изображены диаграммы Найквиста и Боде.
Диаграмма Найквиста строится в системе координат: по оси абсцисс откладывается действительная часть передаточной функции при  , по ординат – мнимая. Для получения годографа осуществляется изменение частоты от 0 до ∞.
, по ординат – мнимая. Для получения годографа осуществляется изменение частоты от 0 до ∞.

Рис.3.13. Фазовый портрет – диаграмма Найквиста

Рис.3.14. Частотная характеристика – диаграмма Боде
Пример 4. Анализ динамических свойств на основе
Дифференциальной модели
Постановка задачи
Исследовать математическую систему, показанную на рис. 3.1

Рис. 3.15. Модель системы подрессоривания:
 - силовое воздействие;
- силовое воздействие;
 - кинематическое воздействие.
- кинематическое воздействие.
и исследовать ее при заданных числовых значениях параметров

Здесь  и
и  - амплитуды кинематического и силового воздействий соответственно.
- амплитуды кинематического и силового воздействий соответственно.
Решение
Система описывается дифференциальным уравнением второго порядка
 . (3.1)
. (3.1)
Преобразуем уравнение к виду, необходимому для моделирования в среде Matlab Simulink
 . (3.2)
. (3.2)
Схема для решения дифференциального уравнения представлена на рис. 3.2.
Построение модели начинаем с сумматора. К выходу сумматора подключается линейный преобразователь (множитель 1/m), на выходе которого получаем значение второй производной. Далее подключаем два интегратора, на выходе которых получаем значение первой производной и самой функции.
Далее устанавливаем связи между входами и выходами соответствующих блоков, применяя, где необходимо, дополнительные преобразователи и сумматоры).
Для вычисления производной кинематического воздействия используется блок дифференцирования.

Рис.3.16. Схема Matlab Simulink для решения уравнения (3.2)