И САПР
Конспект лекций
Челябинск
Издательский центр ЮУрГУ
УДК 621.311(07)
Б907
Одобрено
учебно-методической комиссией
энергетического факультета
Рецензенты:
И.М.Кирпичникова, А.В.Бондаренко
Булатов Б. Г., Тарасенко В.В.
Модели оптимального развития энергосистем и САПР: Конспект лекций / Б.Г.Булатов, В.В.Тарасенко. – Челябинск: Издательский центр ЮУрГУ, 2013. – 101 с.
Конспект лекций предназначен для самостоятельной работы студентов всех форм обучения по направлению 140200 – Электроэнергетика специальностей: 140204 – «Электрические станции»; 140205 – «Электроэнергетические системы и сети»; 140203 – «Релейная защита и автоматизация электроэнергетических систем», бакалавров по направлению «Электроэнергетика» и магистров, осваивающих программу «Интеллектуальные энергетические системы и сети».
В конспекте рассматриваются общие вопросы принятия оптимальных решений, методы прогнозирования, линейные оптимизационные модели выбора структуры генерирующих мощностей, нелинейные модели планирования развития электрических сетей и приведены основные сведения по системам автоматизированного проектирования. Методы прогнозирования и оптимизационные модели сопровождаются числовыми примерами, иллюстрирующими теоретический материал.
УДК 621.311(07)
Издательский центр ЮУрГУ, 2013
ВВЕДЕНИЕ
Энергосистема – одна из сложнейших и дорогих технических систем, созданных человеком. Она тесно связана со всеми отраслями народного хозяйства и постоянно развивается.
При планировании развития больших систем, а, как известно, с точки зрения управления, энергосистемы относятся к большим системам, для которых характерны многокритериальность, неполнота информации и неоднозначность решений, проявляющаяся в наличии зоны вероятно-оптимальных решений, в настоящее время используется метод сопоставительного проектирования, или другими словами – метод сравнения вариантов. Сравнение вариантов, число которых всегда ограничено различными факторами, не гарантирует поиск действительно наилучшего варианта. Обычно лучший вариант выбирается по какому-то критерию, как правило, экономическому иногда с учетом надежности. Поэтому часто для реализации принимаются далеко не лучшие варианты только потому, что они сравниваются с ещё более худшими.
В современных условиях повысить качество проектных решений можно путем использования экономико-математических методов и современной вычислительной техники, объединяемых в систему автоматизированного проектирования (САПР).
В основе современных методов планирования технических систем, в том числе и энергетических, лежит математическая модель – система переменных, уравнений и неравенств, которые описывают основные свойства системы и ее связи. Оптимизационная модель дополняется целевой функцией, которая является математической формализацией критерия оптимизации.
В качестве критерия при плановой экономике использовались приведенные затраты:
 ,
,
где ЕН – нормативный коэффициент, обратный сроку окупаемости;  – капитальные вложения;
– капитальные вложения;  – ежегодные издержки;
– ежегодные издержки;  – ущерб от нарушения надежности и снижения качества.
– ущерб от нарушения надежности и снижения качества.
Как известно, энергетические объекты часто строятся длительное время. Например, гидроэлектростанция может сооружаться и вводиться в эксплуатацию годами, а то и несколькими десятками лет. Поэтому при оценке вариантов разновременные затраты дисконтируются, т.е. приводятся к какому-то одному расчетному году с использованием формулы сложных процентов:
 ,
,
где  – год, к которому пересчитываются затраты;
– год, к которому пересчитываются затраты;  – год вложения затрат;
– год вложения затрат;
 – срок сооружения (строительства) с выходом на проектную производительность;
– срок сооружения (строительства) с выходом на проектную производительность;  – ежегодные издержки, которые появляются в год ;
– ежегодные издержки, которые появляются в год ;  – коэффициент приведения разновременных затрат.
– коэффициент приведения разновременных затрат.
Сегодня в условиях рыночной экономики для оценки инвестиционной привлекательности варианта рекомендуются несколько критериев с приведением затрат к начальному году.
Наиболее близким к критерию плановой экономики является чистый дисконтированный доход (ЧДД):
 ,
,
где – рыночный срок;  – эффект;
– эффект;  – затраты;
– затраты;  – коэффициент приведения, определяемый процентом роста банковского капитала.
– коэффициент приведения, определяемый процентом роста банковского капитала.
В условиях одинаковости эффектов  , что характерно для многих задач развития энергетических объектов,
, что характерно для многих задач развития энергетических объектов,  соответствует
соответствует 
 .
.
При выборе варианта может использоваться понятие срока окупаемости, при котором вложенные средства полностью возвращаются за сет дохода от эксплуатации объекта.
Оценкой эффективности вложений может служить внутренняя норма доходности R, т.е. такое значение коэффициента дисконтирования, при котором величина разности прибыли и затрат, обозначаемой NPV, равна нулю:
 ,
,
или индекс прибыльности, который обозначается как PI и определяется следующим образом:
 .
.
Для иллюстрации этих экономических понятий проведем упрощенную оценку эффективности затрат на ввод установки малой генерации мощностью 1000 кВт на предприятии с плотным графиком нагрузки (Тм=7000 ч.) для покрытия потребностей в электроэнергии вместо покупки на розничном рынке.
Ориентировочные значения технико-экономических показателей: удельная стоимость оборудования Ко=35тыс.руб/кВт, удельный расход газа Во=0,3 куб.м/кВт.ч, ежегодные расходы на эксплуатацию и ремонт Иэ=4,3 млн. руб., рыночные тарифы на электроэнергию 2,92 руб./кВт.ч и на газ Тг=1,5 руб./куб.м.
При этом экономия на стоимости замещаемой годовой энергии составит Э=1000*7000*2,92 =20,45 млн.руб. Затраты на газ за год Зг =1,5*0,3*1000*7000=3,15 млн.руб.
Общая годовая прибыль составит П=Э-Иэ-Зг= 20.45-4.3-3.15=15,0 млн.руб.
При стоимости установки К=35 млн. руб срок окупаемости составит примерно Ток=3,2 года.
Ниже представлена оценка эффективности по рыночным критериям с учетом дисконтирования. При этом несколько усложним задачу, учитывая как разовые с распределением по годам затраты на разработку проекта в объеме 6000 тыс. руб., так и затраты на реализацию проекта, включающие затраты на установку - 35000 тыс.руб. и последующие затраты на утилизацию тепла объемом 10000 тыс. руб. с ожидаемой прибылью в 5000 тыс.руб.
Таким образом, общие инвестиционные расходы:
в течении условного года выполнения проекта: 6000 тыс. руб,.
в течении 1-го года реализации: 35000 тыс. руб.
в течении 2-го года: 10000 тыс. руб.
Прибыль в объеме 15000 тыс.руб. определяется за счет компенсации затрат на покупку электроэнергии за вычетом затрат на газ, ремонт и эксплуатацию, а также за счет эффекта в 5000 тыс.руб. при утилизации тепла и составляет:
во 2-ой год: 15000 тыс. руб.;
в 3-ий и последующие годы: 20000 тыс. руб.;
На основе анализа динамики инфляционных процессов ставку дисконта принимаем 10%. Расчетный период принят равным Т=7 лет.
Все расчеты сведены в таблицу.
| Годы | ||||||||
| Затраты, тыс. руб. | -6000 | -35000 | -10000 | |||||
| Поступления, тыс. руб. | ||||||||
| Сальдо | -6000 | -35000 | ||||||
| Накопленное сальдо | -6000 | -41000 | -36000 | -16000 | ||||
| Норма дисконта | 0,1 | 0,1 | 0,1 | 0,1 | 0,1 | 0,1 | 0,1 | 0,1 |
| Ставка дисконта | 1,0 | 1,1 | 1,21 | 1,33 | 1,46 | 1,61 | 1.77 | 1,95 |
| Дисконтированное сальдо | -6000 | -31820 | ||||||
| Накопленное дисконтированное сальдо | -6000 | -37820 | -33690 | -18652 | -4982 |
В расчетах далее объемы затрат представлены в млн. руб.
Чистый дисконтированный доход ЧДД составляет 29055 тыс. руб.
Простой срок окупаемости
 года.
года.
Дисконтированный срок окупаемости
 года.
года.
Внутренняя норма доходности R определяется решением нелинейного уравнения, полученного по условию NPV=0:

Решение данного уравнения даёт следующее значение внутренней нормы доходности

Индекс прибыльности определяется следующим образом:

Все рассмотренные критерии сегодня находят применение в практике принятия решений по оптимальному развитию энергосистем и их объектов, в том числе и методы приведенных затрат, которые хотя и применялись в период опережающего развития энергетики и создания ЕЭС СССР, но являются полезными и для существующего этапа развития энергетики России. Конечно, они корректируются с учетом рыночных особенностей, новой структуры и появления компаний с приоритетной направленностью на прибыль.
Оптимизационные модели планирования развития в сочетании с современными информационными технологиями и техническими средствами обработки информации и составляют основу систем автоматизации проектирования (САПР).
1. МЕТОДЫПРИНЯТИЯ ОПТИМАЛЬНЫХ РЕШЕНИЙ
1.1. Свойства больших систем
С позиции управления энергосистема рассматривается как большая система кибернетического типа. Ниже перечислены свойства больших систем.
1. Управляемость на основе обработки информации (рис. 1.1).

Рис. 1.1
2. Доминирующая роль человека, т.е. обязательное присутствие и активное участие человека в контуре управления (рис. 1.2).

Рис. 1.2
3. Влияние внешних воздействий и факторов. Например, существенно влияют на принятие решений погодные факторы (грозовой период, и как следствие – рост числа отключений ЛЭП из-за попаданий молнии), условия поставки топлива (к примеру, замерзание морского пути при доставке мазута танкерами для электростанций Дальнего Востока) и др.
4. Двойственность природы, которая проявляется в действии
· закономерностей;
· случайных процессов, связанных с внешними причинами.
В силу этого в больших системах рассматривают три вида информации.
1) Детерминированная (причинно-обусловленная), которая определяется законами физики.
2) Вероятностно-определенная, для которой известен закон распределения случайной переменной х, обычно нормальный (рис. 1.3), с известным математическим ожиданием  и стандартным отклонением
и стандартным отклонением  . Для нормального закона характерно правило 3-х сигм:
. Для нормального закона характерно правило 3-х сигм:
 .
.
В простейшем случае для случайной выборки, где число наблюдений равно  ,
,
математическое ожидание:
 , (1.1)
, (1.1)
дисперсия
 , (1.2)
, (1.2)
стандартное отклонение:
 .
.

Рис. 1.3.
3) Неопределенная информация, для которой часто почти всё неизвестно за исключением может быть возможного интервала изменения параметров системы или процесса.
5. Многокритериальность. В больших системах энергетики, как правило, действуют несколько критериев (целей) функционирования, некоторые из которых перечислены ниже:
· экономичность;
· надежность энергоснабжения;
· качество электроэнергии;
· экологический критерий;
· демографический и др.
Поиск наилучшего оптимального решения в условиях многих критериев, часто противоречивых, ищется в области Парето, где улучшение по одному критерию приводит к ухудшению по другому. Здесь решение возможно только на основе компромисса, когда одному критерию отдается предпочтение по отношению к другим.
Математически многокритериальная задача может быть сведена к одному критерию разными методами, например, путем скаляризации:
 , (1.3)
, (1.3)
где  – критерии;
– критерии;
 – коэффициенты важности, определяемые экспертным путем.
– коэффициенты важности, определяемые экспертным путем.
6. Динамизм развития. Здесь следует отметить два важных момента.
1) Влияние предыстории. Оптимальные решения для будущего развития определяются не только состоянием системы в исходный момент, но и тем, как пришла система в это состояние. Часто этим свойством пренебрегают, т.к. его не просто учитывать при планировании. Поэтому процессы рассматриваются как марковские, где решение о развитии системы в будущем определяется только состоянием системы в данный момент.
2) Влияние последействия. Оптимальное решение, принимаемое в момент , о путях развития системы к моменту А внутри расчетного периода , зависит от тех требований, которые будут предъявляться к системе в будущем за периодом (рис. 1.4).

Рис. 1.4.
Это неприятное свойство оказывает влияние на выбор расчетных периодов планирования . Понятно, что сиюминутные решения могут в дальнейшем развитии навязывать далеко не лучшие решения. Жизнь дает тому много примеров. Для повышения качества проектных решений в этой ситуации используют скользящее планирование, при котором принимаемые решения для будущего развития еще не реализованной части проекта уточняются по мере приближения начала реализации этого будущего, когда информация становится более определенной и достоверной.
При планировании развития больших систем используется системный анализ. Отметим его основные этапы.
1. Формулировка задачи, сбор исходной информации на основе прогнозирования. Локализация системы (рассматривается только энергосистема, отделенная от других отраслевых систем).
2. Определение критериев развития.
3. Составление математической модели, т.е. математическая формализация свойств системы и критерия.
4. Выбор метода решения модели. Обычно составляемая модель уже должна ориентироваться на определенные методы.
5. Решение модели на ЭВМ.
6. Выбор варианта развития на основе полученного решения путем перехода от переменных модели к реальным объектам (блоки на электростанциях, ЛЭП и т.п.). При этом могут вводиться уточнения, учитывающие те свойства системы, которые не удалось описать с помощью математического аппарата. Анализ решения может приводить к уточнению математической модели.
Оптимальное планирование должно обеспечивать поиск экстремума критерия. Для решения оптимизационных моделей разработаны многочисленные методы, объединяемые в раздел «Математическое программирование», который изучался в дисциплине «Методы исследования операций». Поэтому здесь напоминаются только основные положения и методы решения задач на поиск экстремума.
1.2. Математическое программирование
Задача математического программирования формулируется следующим образом: для целевой функции  необходимо найти экстремум в допустимой области, определяемой системой некоторых ограничениях
необходимо найти экстремум в допустимой области, определяемой системой некоторых ограничениях  . Здесь
. Здесь  – вектор неизвестных;
– вектор неизвестных;  – вектор-функция ограничений.
– вектор-функция ограничений.
В зависимости от вида функций F(X) и  различают линейное и нелинейное программирование.
различают линейное и нелинейное программирование.
1.2.1. Линейное программирование
В задачах линейного программирования и – линейные функции. Задача заключается в поиске среди множества неотрицательных решений системы линейных алгебраических уравнений (СЛАУ)  такого решения, при котором обеспечивается
такого решения, при котором обеспечивается  , где
, где  . При этом число неизвестных n в СЛАУ должно быть больше числа уравнений m.
. При этом число неизвестных n в СЛАУ должно быть больше числа уравнений m.
Решение задачи, как известно, всегда лежит в вершине допустимой области, соответствующей базисному решению, в котором свободные переменные равны нулю. Если система линейно независима, то число свободных неизвестных  .
.
Метод решения задачи, называемый симплекс-методом, основан на просмотре базисных решений, начиная с произвольно выбранного. Просмотр проводится путем перехода к соседнему базисному решению в направлении экстремума. Существуют многочисленные программы на ЭВМ, в частности, на кафедре ЭССиС разработана программа SIMPLE.EXE, позволяющая находить решение задачи с любой формой ограничений. Данная программа допускает запись в файл, имеет режим корректировки системы ограничений в полученном решении, что позволяет достаточно просто проводить всесторонний анализ вариантов. При несовместной системе ограничений выводятся невязки по ограничениям, что упрощает процесс поиска ошибки в линейной модели. Программа имеет удобный для работы интерфейс.
Следует заметить, что на сегодняшний день при поиске оптимальных решений и планировании развития находят применение линейные модели в силу их относительной простоты и «прозрачности» и надежного метода решения.
1.2.2. Нелинейное программирование
В задачах нелинейного программирования целевая функция либо одно из ограничений  – нелинейные функции. Общих способов решения задачи нелинейного программирования не существует; в каждой конкретной задаче способ выбирается в зависимости от вида функции и накладываемых на элементы решения ограничений. Рассмотрим наиболее популярные.
– нелинейные функции. Общих способов решения задачи нелинейного программирования не существует; в каждой конкретной задаче способ выбирается в зависимости от вида функции и накладываемых на элементы решения ограничений. Рассмотрим наиболее популярные.
1. Метод покоординатного поиска. Оптимизация производится поочередно по одной переменной при фиксированных значениях остальных. Данный метод прост и широко используется. Недостаток – плохая сходимость для некоторого вида функций.
2. Градиентный метод. Основное уравнение итерационного процесса при поиске  :
:
 , (1.4)
, (1.4)
где k – номер итерации, t – шаг,  – вектор- градиент.
– вектор- градиент.
3. При учете ограничений в форме равенств используется метод Лагранжа:
,
 .
.
Функция Лагранжа включает все ограничения, умноженные на неопределенные множители:
 . (1.5)
. (1.5)
Задача сводится к безусловной оптимизации одной функции – функции Лагранжа.
4. Для учета ограничений в форме неравенств целесообразно использование методов нулевого порядка в сочетании со штрафными функциями:
,
.
Комплексная функция:
 , (1.6)
, (1.6)
где  – коэффициент штрафа.
– коэффициент штрафа.

1.3 Интеллектуальные методы
Оптимизационные задачи в технических системах имеют ряд характерных особенностей, среди которых большая размерность задач, дискретность переменных, большое количество ограничений, возможное наличие локальных экстремумов целевой функции, наличие элементов логики, неопределённость исходной информации. Эти и другие особенности решаемых задач затрудняют применение традиционных методов оптимизации (линейного и нелинейного программирования, а также методов простого перебора).
Для решения таких задач стали применяться методы поиска оптимальных решений, основанные на моделировании различных естественных процессов. Наибольшую известность среди таких методов получили генетический алгоритм и искусственные нейронные сети (ИНС). Характерной чертой всех подобных методов является направленность поиска решения, в таких алгоритмах перебираются не все возможные варианты, а только варианты в направлении приближения к оптимуму.
Для того чтобы применить какой-либо из существующих методов оптимизации для определения, например, оптимальной мощности и места размещения будущей станции в энергетической системе, нужно составить математическую модель этой системы. Математическое описание системы заключается в выборе неизвестных, формализации свойств системы и её связей, а также целевой функции. Например, это может быть некоторый набор математических выражений, позволяющий балансы мощности в узлах нагрузок, ограничения мощности электрических станций и т.п.. Составить математическую модель энергетической системы с учётом всех связей, факторов и субъективных действий лиц, принимающих решения, затруднительно, поэтому при математическом описании энергетических систем всегда принимаются различного рода упрощения. Однако, существует и принципиально иной подход к получению зависимости выходных параметров от входных, основанные на моделировании процессов, происходящих в мозге – искусственные нейронные сети.
Такие методы поиска оптимальных решений лежат в основе современных систем искусственного интеллекта.
1.3.1. Генетический алгоритм
Механизм поиска оптимального решения с помощью ГА сходен с процессами эволюции и естественного отбора, происходящими в природе.
Все изменения во время эволюции происходят в хромосомах, по сути это «переменные», по которым производится «оптимизация» в природе. При решении задач оптимизации в энергетике в качестве таких переменных могут приниматься, например, число целесообразных к сооружению блоков разного типа или ЛЭП. В природе выбранное количество хромосом определяет особь, каждая особь уникальна и не похожа ни на одну другую. В задачах выбора количества блоков для установки на каждой станции, определяется некоторая функция F(n1, n2,…,ni), называемая также целевой (ЦФ), где ni – количество блоков на i-й станции. Эта функция может определять затраты на ввод блоков, расход топлива и т.п. Роль особи в рассматриваемых расчётах будет выполнять определённый состав оборудования с оценкой приспособленности в виде целевой функции. Каждая хромосома состоит из генов - это ещё более мелкие составляющие, которые определяют свойства уже конкретной хромосомы. В решаемой задаче хромосомы – это десятичные числа, закодированные в двоичном коде. Биты двоичного кода определяют «свойства» образуемого ими десятичного числа, бит в ГА рассматривается как ген.
Дальнейшая работа ГА инвариантна для любой задачи и состоит в следующем: каждая особь проходит проверку на соответствие условиям ограничений задачи и если им не соответствует, то вместо неё генерируется другая особь. Нарушение ограничений можно учитывать добавлением к целевой функции штрафных санкций. Далее из популяции выбираются наиболее приспособленные особи, т.е. имеющие наименьшее значение ЦФ. Особи, прошедшие отбор имеют право производить потомков. При этом, чем более приспособленной будет особь, тем больше у неё шансов на производство потомков. При скрещивании происходит обмен генами, и порождаются новые особи, имеющие гены от обоих родителей. Такая наследственная передача информации позволяет генетическому алгоритму сосредотачиваться на наиболее оптимальном решении, не перебирая заведомо бесперспективные варианты. Некоторые особи могут мутировать с заданной вероятностью, при этом случайным образом заменяется один из генов на противоположный. Это позволяет алгоритму выбираться из локальных оптимумов. Одновременно в процессе эволюции участвует сразу несколько особей, образующих популяцию. Таким образом, генетический алгоритм осуществляет поиск не путём улучшения одного решения, а путём использования сразу нескольких альтернатив на множестве допустимых решений. Схема работы ГА представлена на рисунке 1.5.
Блоки алгоритма выполняют следующие функции:
1. Генерация начальной популяции особей, имеющих набор хромосом со случайными генами.
2. Проверка особей на соответствие ограничениям.
3. Замена недопустимых особей.
4. Ранжирование особей по уровню целевой функции F.
5. Проверка условий окончания расчёта.
6. Определение родительских пар и формирование потомков.
7. Выбор момента и осуществление мутации.

Рис. 1.5. Схема работы генетического алгоритма
Для иллюстрации основных этапов работы ГА рассмотрим упрощённый пример определения числа и типа блоков для размещения в системе малой генерации. Для покрытия дефицита мощности в 200 кВт могут использоваться установки мощностью 10, 20, 30 и 40 кВт, стоимость которых, соответственно 50, 90, 150 и 210 условных единиц.
В качестве переменных приняты неизвестное число xi установок каждого вида. Задача сводится к поиску минимальных затрат

с учётом ограничений по условию покрытия дефицита мощности
 .
.
В соответствии с идеей генетического алгоритма решение начинается с выбора нескольких, например пяти, случайных решений, образующих исходную популяцию особей, каждая из которых определяется хромосомами
Таблица 1.1
1-е поколение хромосом и их содержимое
| Хромосома | (х1,х2,х3,х4) |
| (0,5,2,2) | |
| (8,1,3,0) | |
| (3,4,2,1) | |
| (2,0,1,2) | |
| (7,2,0,1) |
Каждая хромосома количественно характеризуется степенью выживаемости (fitness). В нашем случае для этой цели можно использовать функцию
 ,
,
которая приведёт поиск решения к задаче безусловной оптимизации с учётом ограничения по методу штрафных функций. В таблице 1.2 приведены коэффициенты выживаемости F при коэффициенте штрафа Кш=1.
Таблица 1.2
Коэффициенты выживаемости первого поколения хромосом (набора решений)
| Хромосома | f | g | F |
| -10 | |||
| -70 | |||
| -50 |
Относительная оценка приоритета для участия в выборе родительских пар, определяется на основе величины полученных функций полезности в %:

Вероятность участия в скрещивании определяется (табл. 1.3)

Таблица 1.3
Вероятность оказаться родителем
| F= | Ai=αi·106= | Pi= | 0,1335 | ||
| 0,3557 | |||||
| 0,3302 | |||||
| 0,0664 | |||||
| 0,1142 | |||||
| Fср= | ΣAi= | ΣPi= | 1,0000 |
Для выбора пяти пар родителей используется генератор псевдослучайных чисел ri с равномерным распределением ri=0,…, 1.0. Весь диапазон ri распределяется между возможными родителями пропорционально найденным вероятностям (табл. 1.4), что позволяет случайным образом выбрать родительскую хромосому. Например, при генерации ri=0,085 выбирается №1, при ri=0,856 – №4.
Таблица 1.4
Распределение диапазона псевдослучайных чисел по родителям
| Номер хромосомы | ||||||
| Интервал диапазона | От | 0,0000 | 0,1335 | 0,4892 | 0,8194 | 0,8858 |
| до | 0,1335 | 0,4892 | 0,8194 | 0,8858 | 1,0000 |
Обратившись 10 раз к генератору ri, можно случайным образом определить все 5 родительских пар. Возможные случайные варианты родительских пар в таблице 1.5:
Таблица 1.5
Возможные родительские пары
| Хромосома отца | |||||
| Хромосома матери |
Каждый потомок содержит информацию о генах и отца и матери. Это свойство можно обеспечить различными способами, однако в данном случае можно использовать т.н. "кроссовер" (cross-over). Пусть мать содержит следующий набор решений: n1м,n2м,n3м,n4м, а отец - n1о,n2о,n3о,n4о, тогда возможно 6 различных кроссоверов (| = разделительная линия):
Таблица 1.6
Кроссоверы между родителями
| Хромосома-отец | Хромосома-мать | Хромосома-потомок |
| n1о | n2о,n3о,n4о | n1м | n2м,n3м,n4м | n1м,n2о,n3о,n4о или n1о,n2м,n3м,n4м |
| n1о,n2о | n3о,n4о | n1м,n2м | n3м,n4м | n1о,n2о,n3м,n4м или n1м,n2м,n3о,n4о |
| n1о,n2о,n3о | n4о | n1м,n2м,n3м | n4м | n1о,n2о,n3о,n4м или n1м,n2м,n3м,n4о |
Есть достаточно много путей передачи информации потомку, и кроссовер – только один из них. Расположение разделителя может быть абсолютно произвольным, как и то, кто отец или мать будут слева от черты.
Таблица 1.7
Симуляция кроссоверов хромосом родителей
| № пп | Хромосома-отец | Хромосома-мать | Хромосома-потомок | Fitness |
| (7|2,0,1) | (8|1,3,0) | (7,1,3,0) | ||
| (3,4|2,1) | (8,1|3,0) | (8,1,2,1) | ||
| (0,5,2|2) | (8,1,3|0) | (0,5,2,0) | ||
| (2,0|,1,2) | (3,4|2,1) | (3,4,1,2) | ||
| (0|5,2,2) | (3|4,2,1) | (0,4,2,1) |
Теперь можно вычислить коэффициенты выживаемости (fitness) потомков.
Таблица 1.8
Коэффициенты выживаемости потомков (fitness)
| Хромосома-потомок | Fitness | Pi | ri |
| (7,1,3,0) | 0,1989 | 0,1989 | |
| (8,1,2,1) | 0,3361 | 0,5349 | |
| (0,5,2,0) | 0,0851 | 0,6200 | |
| (3,4,1,2) | 0,1788 | 0,7988 | |
| (0,4,2,1) | 0,2012 | 1,0000 | |
| Fср= |
Средняя приспособленность (fitness) потомков оказалась 2038, в то время как у родителей этот коэффициент равнялся 2748. Эти потомки могут порождать новое поколение или мутировать. Приёмы мутации могут быть весьма разнообразны. Можно заменить одно из значений какой-нибудь хромосомы на случайное целое число, можно изменить на 0, или добавить ±1 и т.п. Критерии окончания итерационного процесса в методе ГА не имеют четких рекомендаций и под каждый конкретный тип задач подбираются отдельно.
Преимуществом ГА является использование при реализации алгоритма вычислений только F(Х) и проверки выполнения ограничений. Изменяющиеся особи в процессе размножения проверяются на допустимость и уровень приспособленности, в результате которой дальнейшее развитие получают только перспективные особи. При этом в качестве особей могут использоваться различные наборы независимых параметров системы или режима, которые и должны оптимизироваться.
Таким образом, метод ГА является весьма перспективным и может адаптироваться для решения различных оптимизационных задач в энергетике, как проектных, так и эксплуатационных, в том числе целочисленных и даже имеющих несколько экстремумов.
Искусственные нейронные сети
ИНС представляют собой математическую модель, построенную по принципу организации и функционирования биологических нейронных сетей — сетей нервных клеток живого организма. Это понятие использовалось при попытке смоделировать процессы, протекающие в мозге.
Искусственные нейронные сети представляют собой систему соединённых и взаимодействующих между собой простых процессоров (искусственных нейронов). Такие процессоры обычно довольно просты, особенно в сравнении с процессорами, используемыми в персональных компьютерах. Каждый процессор подобной сети имеет дело только с сигналами, которые он периодически получает, и сигналами, которые он периодически посылает другим процессорам. И, тем не менее, будучи соединёнными в достаточно большую сеть с управляемым взаимодействием, такие локально простые процессоры вместе способны выполнять довольно сложные задачи.
Биологический нейрон – сложная система, математическая модель которой до конца не построена. В основе теории ИНС лежит предположение о том, что вся эта сложность несущественна, а свойства мозга объясняются характером их соединения. Поэтому вместо точных математических моделей нейронов используется простая модель так называемого формального искусственного нейрона (рис. 1.6).
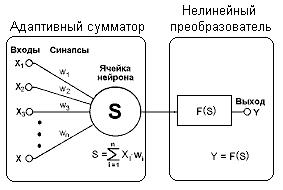
Рис. 1.6
Он имеет входы, куда подаются некоторые числа  , поступающие далее в блок, называемый адаптивным сумматором. На его выходе формируется взвешенная сумма входов:
, поступающие далее в блок, называемый адаптивным сумматором. На его выходе формируется взвешенная сумма входов:
 , (1.7)
, (1.7)
где wi – весовые коэффициенты, определяемые в процессе обучения.
Затем эта сумма подается на нелинейный преобразователь, моделирующий передаточную характеристику биологического нейрона, на выходе которого активируется сигнал
 . (1.8)
. (1.8)
Функция F нелинейного преобразователя называется активационной функцией нейрона. Существует множество видов таких функций, конкретный вид функции определяется спецификой задачи. Наиболее распространены функция скачка и л