Приведенный момент сопротивления машины при номинальной частоте вращения определяется по следующей формуле:
 |
(2)
Подставляя числовые значения в формулу (2) получаем:
 |
Для построения механической характеристики воспользуемся общей формулой:
 (3)
(3)
где Mс – момент сопротивления механизма при любой частоте вращения, Н.м;
Mсо – начальный момент сопротивления, Н.м;
x – показатель степени, характеризующий изменение момента при изменении частоты вращения;
y – угловая скорость вращения, выраженная в относительных единицах, y = w/wн;
Показатель степени x для транспортеров x = 0, следовательно:
 |
Механическая характеристика Mc = f(w) будет иметь следующий вид:
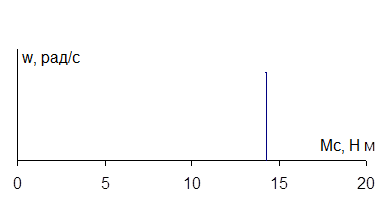
Рис.2. Механическая характеристика рабочей машины
Механическая характеристика рабочей машины приведена на листе 1 графической части.
Для построения нагрузочной диаграммы определяем время заполнения погрузчика:

где l – длина транспортера, м;
υ – скорость движения корма, м/с.

Время освобождения транспортера примем равным времени заполнения.
Время работы двигателя определяется количеством корма для кормления, либо величины емкости-накопителя. Для нашего случая принимаем время работы транспортера, равным 1 часу или 3600 секундам.
Принимаем мощность холостого хода Pxx равной:

Нагрузочная диаграмма изображена на листе 1 графической части.
1.4 Предварительное определение режима работы электропривода
Поскольку электропривод работает 1 час, а перерывы между пусками достигают 8 часов (время между кормлениями), то выбираем следующий режим работы электропривода:
Т=43,7 мин, tр=12,2 мин, поэтому выбираем двигатель кратковременного режима работы (S2).
1.5 Обоснование выбора электродвигателя по роду тока, типу, модификации, по частоте вращения, по климатическому исполнению и категории размещения
Поскольку большинство электродвигателей в сельском хозяйстве являются асинхронными двигателями переменного тока с короткозамкнутым ротором, то выбираем асинхронный электродвигатель с короткозамкнутым ротором. Достоинствами таких электродвигателей являются: простота и надежность работы, большая распространенность, что облегчает эксплуатацию и обслуживание электродвигателя, наличие сети переменного тока на всей территории Республики Беларусь и др.
Поскольку электродвигатель запускается при тяжелых условиях (под нагрузкой), то выбираем электродвигатель с повышенным пусковым моментом.
Т.к. двигатель работает в пыльных условиях, то выбираем двигатель исполнения IP 54.
Республика Беларусь является страной с умеренно-холодным климатом. Электродвигатель находится в закрытом неотапливаемом помещении, поэтому по климатическому исполнению и категории размещения выбираем электродвигатель УХЛ4.
1.6 Выбор электродвигателя по мощности с учетом режима работы
Исходя и условий и требования технологического процесса, а также значения Pм выбираем асинхронный электродвигатель с синхронной частотой вращения 750 об/мин. Тип 4А100L8У3 IP54.
Технические данные электродвигателя сводим в таблицу 2
Таблица 2.Технические данные электродвигателя серии АИР00А4.
| Pн, КВт | h, %. | cosj, о.е. | Sн, % | Sк, % | m, кг | kп | kmax | kmin | kI | Gм,Кг | I,кг.м2 |
| 1,5 | 0,65 | 10,8 | 1.6 | 1.9 | 1.3 | 1,49 | 0,013 |
Частота вращения вала двигателя:


Определяем номинальный момент двигателя:

Для построения механической характеристики электродвигателя найдем частоты вращения других характерных точек характеристики:
1) пуск:
 ;
; 
2) минимум:


3) критическая:


1.7. Расчеты по определению температуры электродвигателя за цикл нагрузочной диаграммы
Для определения повышения температуры электродвигателя над окружающей средой воспользуемся уравнением нагрева электродвигателя:

где Uуст = DP/А – установившееся превышение температуры электродвигателя;
T = C/A – постоянная времени нагрева электродвигателя;
t – время от начала участка;
Uнач – превышение температуры в начале участка;
A – удельная теплоотдача электродвигателя:

Принимаем Uун = 70°С;
DPн – потери мощности при номинальной загрузке:

С – удельная теплоемкость электродвигателя массой m:

Подставив числовые значения в формулы, получаем:




Принимая, что в начале работы Uнач = 0 строим кривую нагрева электродвигателя. Расчеты сводим в таблицу 3.
Таблица 3.Зависимость U от времени.
| t, с | U, °С |
| 36,5 | |
| 62,3 | |
| 66,4 | |
| 68,2 | |
| 69,2 | |
| 69,7 |
2. Проектирование передаточного устройства
2.1 Выбор и обоснование кинематической схемы
Согласно технологической схеме рабочей машины, транспортер приводится в движение электродвигателем через цепную передачу. Цепная передача отличается простотой в монтаже и эксплуатации, исключает проскальзывание, в отличие от ременных передач, а также является намного дешевле и легче, чем редукторы.
2.2 Расчет (выбор) элементов передачи или редуктора
В соответствии с п. 2.1. выбираем элементы кинематической схемы: в качестве передаточных устройств служат ведомая и ведущая звездочки, а также цепь.
Определяем угловую скорость приводного вала транспортера:

гдеr - радиус переднего (ведущего) вала транспортера, м.
Тогда:

Определяем общее передаточное число:


Принимаем передаточное число цепной передачи iц равным 10.
2.3 Обоснование и выбор монтажного исполнения двигателя
Поскольку помещение является пыльным, то в качестве проводника для подведения сети к электродвигателю целесообразно применить кабель типа АВВГ с алюминиевыми жилами.
Высота оси вращения выбранного электродвигателя равна 100 мм.
Поскольку ширина транспортера равна 560 мм, то целесообразнее будет выбрать исполнение, при котором габариты двигателя будут не более 560 мм.
Наиболее удобны при монтаже электродвигатели, крепящиеся на лапы.
Исходя из этого, выбираем электродвигатель исполнения IM2081.
3. Переходные процессы в электроприводе
3.1 Определение электромеханической постоянной времени при рабочем и критическом скольжениях
Для вычисления приведенного момента инерции энергетического машинного устройства необходимо знать момент инерции ротора электродвигателя Iрот, момент инерции машины Iм, момент инерции редуктора Iр.
Момент инерции рабочей машины приближенно можно определить по следующей формуле:
где mтр - масса транспортера, кг;
Jред=0,2×Jрот=0,2×0,013=0,0026 кг×м2 - момент инерции редуктора;
Получаем:

Электромеханическая постоянная времени переходных процессов привода с асинхронным электродвигателем вычисляется по формуле:

гдеw0 – угловая скорость машинного устройства, w0 = 73,1рад/с;
S – скольжение электродвигателя.
Находим электромеханическую постоянную при критическом скольжении:

Находим электромеханическую постоянную при номинальном скольжении:

3.2 Обоснование способа пуска и торможения электропривода
Поскольку электродвигатель включается и выключается под нагрузкой (масса транспортера) то наиболее целесообразным будет способ самоторможения, поскольку в этом случае время выбега будет очень мало.
При пуске необходимо, чтобы транспортер был менее тяжелым для облегчения пуска, поэтому перед выключением рекомендуется подождать освобождения транспортера от корма, и только затем его выключить.
3.3 Определение времени пуска и торможения, максимального ускорения графо-аналитическим методом
Для начала определим продолжительность разбега и остановки электродвигателя.
Время пуска tп определяется следующим образом:

гдеI – приведенный момент инерции;
wн – номинальная угловая скорость;
Mп – вращающий момент электродвигателя при пуске;
Mс – средний приведенный момент сопротивления рабочей машины при пуске;
Получаем:

Время остановки tт определяется следующим образом:

В итоге имеем:

Время самоторможения составляет всего 0,11 секунд, что подтверждает выбор способа торможения электропривода.
Для более полного расчета воспользуемся графо-аналитическим способом. При этом, построив механические характеристики двигателя и рабочей машины, строим кривую избыточного момента.
Для более точного расчета времени пуска воспользуемся графоаналитическим методом (рис.3). Строим механическую характеристику двигателя 1 по данным п. 1.7 и рабочей машины 2, затем строим кривую избыточного момента 3, полученную вычитанием момента сопротивления рабочей машины от момента электродвигателя. Кривую избыточного момента представляем ступенчатым графиком 4 для упрощения расчета. Для этого делим график на 10 равных частей. В пределах каждой ступени избыточный момент не изменяется. Кривая разгона 5 строится по данным таблицы 4. При этом время на каждом участке находим по формуле:

гдеwi,wi-1 - угловые частоты в конце и в начале каждого участка соответственно;
Мизбi - избыточный момент на каждом из участков:

Также находим угловое ускорение вала:

Расчеты сводим в таблицу 4.
Таблица 4.Данные расчета времени пуска двигателя.
| Точка | Мдв,Н×м | w,рад/с | Мизб,Н×м | t,с | e,рад/с2 | |
| 32,8 | 18,5 | 0,009 | ||||
| 26,3 | 8,12 | |||||
| 0,014 | ||||||
| 28,5 | 16,24 | 14,2 | ||||
| 0,012 | ||||||
| 30,8 | 24,36 | 16,5 | ||||
| 0,01 | ||||||
| 33,6 | 32,48 | 19,3 | ||||
| 0,008 | ||||||
| 37,1 | 40,61 | 22,8 | ||||
| 0,007 | ||||||
| 39,1 | 48,73 | 24,8 | ||||
| 0,007 | ||||||
| 38,5 | 56,85 | 24,2 | ||||
| 0,007 | ||||||
| 32,8 | 64,97 | 18,5 | ||||
| 0,009 | ||||||
| 14,3 | 73,1 |
Итого: 0,083 с.