Этот расчёт слишком большой. Его можно взять из методы по курсачу Киселёва, страницы 32-44
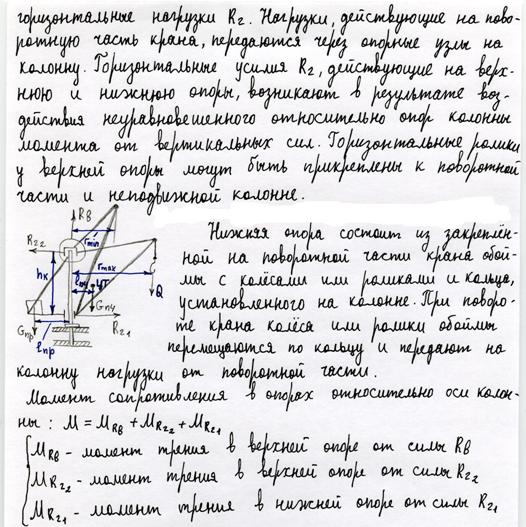
Колонна прикреплена к фундаменту, верхняя пята воспринимает вертикальную нагрузку Rв от веса поворотной части крана с грузом, верхняя и нижняя опора воспринимают
Поворотные краны делятся на две группы:
1 Краны, грузоподъёмность которых не зависит от вылета стрелы;
2 Стреловые (стрелковые) краны, грузоподъёмность котрых изменяется с изменением вылета стрелы.
Сам расчёт – смотри методу по курсачу Киселёва, там же получше изображена кин. схема
(страницы 46-59)
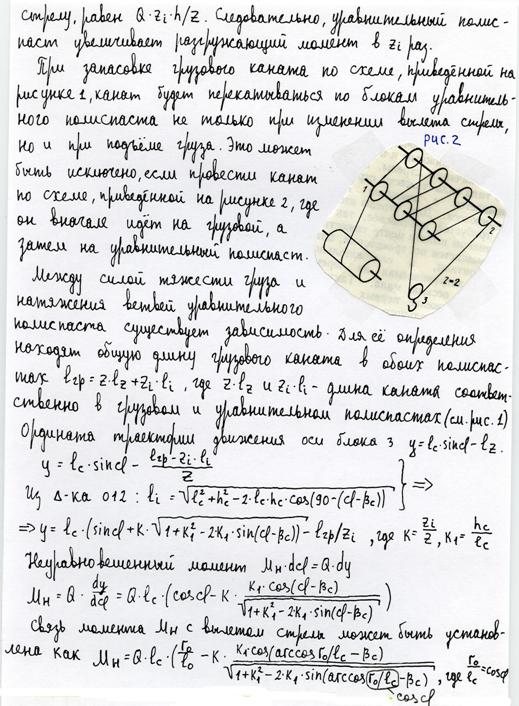
Эти стрелы яляются наиболее лёгкими системами с рабочим изменением вылета, однако, им свойственно относительно интенсивное изнашивание грузового каната.
Однозвенные стрелы бывают:
1 Стрелы с установочным вылетом (изменение вылета происходит редко и, как правило, без груза);
2 Стрелы с рабочим вылетом (вылет стрелы меняется почти в каждом цикле крана с грузом и на большой скорости).
Способы уравнивания траектории движения груза:
1 Уравновешивание сил тяжестей элементов стрелового устройства подвижным противовесом;
2 Если нету противовеса, то нужно придать стреле соответствующее движение (при этом центр тяжести стрелового устройства при качении стрелы либо остаётся неподвижным, либо перемещается по горизонтали);
3 Снижение мощности привода, чтобы обеспечить горизонтальное движение груза при изменении вылета стрелы (это увеличивает безопасность работы груза и удобство управления);
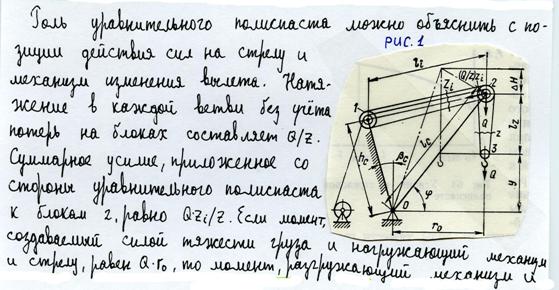
4 Наличие уравнительного полиспаста, специальных отклоняющих блоков;
5 Система блокирования механизмов изменения вылета и подъёма.
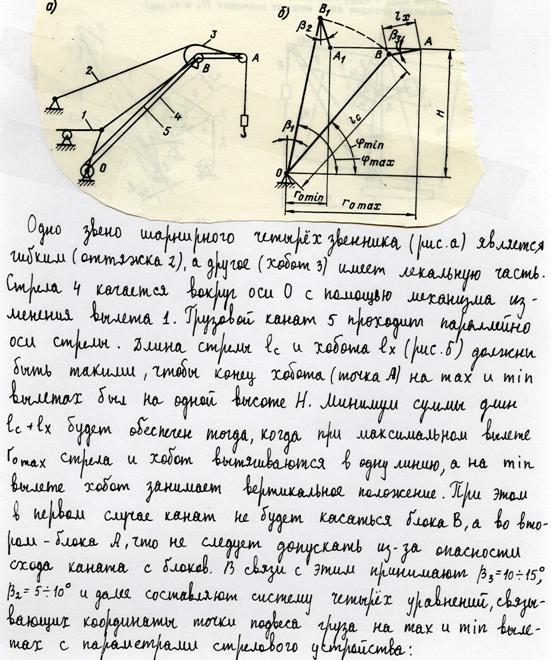
Шарнирно-сочленённые, значит, многозвенные стрелы
|
|
Они бывают:
1 Стрелы с горизонтальным движением точки подвеса груза;
2 Стрелы с негоризонтальным движением точки подвеса груза.
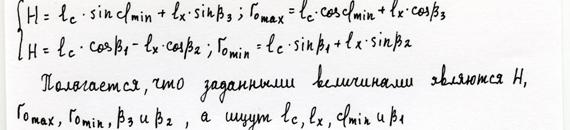
Рассмотрим случай такой стрелы с прямым хоботом (его рисунок и расчёт ниже могут быть неправильными (!)).
Этот расчёт слишком большой. Его можно взять из методы по курсачу Киселёва, страницы 60-76
Для штучных грузов есть очень много захватных приспособлений. Рассмотрим некоторые из них
Поддерживающие захваты
Удерживают груз за выступы, края, прикреплённые к нему кольца, оси или поддерживают снизу.
Бывают с односторонними и с двусторонними лапами
Контейнерные захваты
Широкое распространение в порту на перегрузке среднетоннажных контейнеров получил (3 и 5 т) захват – самоотцеп. Есть также захват с гравитационно-цепным приводом.
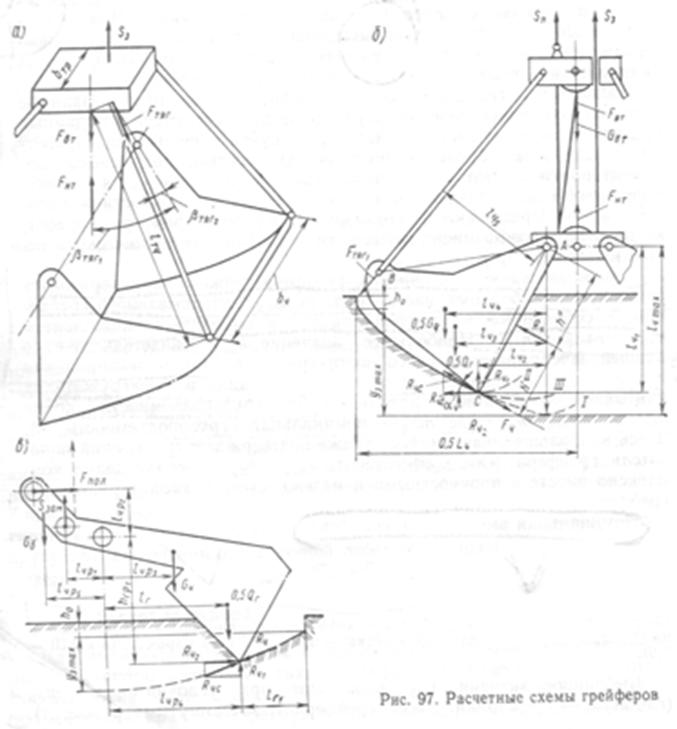
Для перегрузки труб большого диаметра (1020,1220мм) применяют 4-х канатные захваты, работающие по принципу грейфера см. рис в.
Спецификация: 7 жёсткие тяги, 6 траверса, 8 оси, 9 крюки, 1 гибкие тяги, 2 подвески,3 канаты, 4 поддерживающие канаты. Захват устанавливают вдоль оси трубы и с помощью замыкающей лебёдки опускают подвеску, создавая слабину гибких тяг. При включении поддерживающей лебёдки выбирают канаты, которые приводят в действие траверсу и жёсткие тяги, в результате чего оси опускаются за торцы трубы, и происходит её захват крюками. После укладки её в штабель канаты ослабляются, и захват опускается на трубу. Для отцепки захвата выбирают замыкающие канаты, которые поднимают подвеску и натягивают гибкие тяги, при этом поворачивается ось с крюками и происходит отцепка захвата. Нагрузку на тяги определяют по формуле
|
|

где  -сила тяжести груза,
-сила тяжести груза,  -угол отклонения ветви стропа от вертикали,
-угол отклонения ветви стропа от вертикали,  - количество ветвей стропа.
- количество ветвей стропа.
При использовании кранов с одним замыкающим и одним поддерживающим канатами для перевозки труб большого диаметра применяют двух канатные захваты см. рис а), б). Принцип работы такой: При наводки грузозахватного устройства включается замыкающая лебёдка, которая выбирает канат 4 и ползун 6 с траверсой 7 идёт вниз при захвате даётся слабина канату 4, при этом ползун 6 с траверсой 7 идёт вверх. Отцеп осуществляется при ослаблении замыкающего каната и опусканию ползуна с траверсой под действием собственной силы тяжести.
Для случая ненатянутого поддерживающего каната из условия равновесия крюка наибольшая статическая нагрузка равна  где ,
где ,  -силы тяжести трубы и траверсы.
-силы тяжести трубы и траверсы.
При действии на крюк нагрузки  создаётся отпор со стороны трубы с усилием
создаётся отпор со стороны трубы с усилием 
 или
или  . Момент
. Момент 
действует в направлении отцепления крюка, а  в сторону захвата трубы. Условие для надёжного захвата и удержания трубы имеет вид
в сторону захвата трубы. Условие для надёжного захвата и удержания трубы имеет вид  . Если масса верхней траверсы 3 мала, то, принимая
. Если масса верхней траверсы 3 мала, то, принимая  , соблюдают условие
, соблюдают условие  .
.
Двухканатные грейферы применяют в грузоподъёмных машинах, у которых механизм подъёма состоит из двух лебёдок: подъёмной (поддерживающей) и замыкающей. Грейфер такого типа подвешивают на одном замыкающем и одном подъёмных канатах. Верхняя головка связана с нижней траверсой постоянной кинематической связью в виде канатного полиспаста. У двух канатного грейфера полиспаст одинарный кратность полиспаста чётная при креплении конца каната на головке и нечётная при креплении на нижней траверсе. Как вино на рис. замыкающий канат 8 проходит с барабана 13 через направляющие блоки 11 на кабине крана, блоки 10 и 9 на стреле и хоботе и с помощью цепной вставки 6 соединяются с замыкающим канатом грейферного полиспаста. Один конец замыкающего каната закреплён на барабане 13, а другой на верхней головке 5 (при чётной кратности грейферного полиспаста) и реже на нижней траверсе 2 (при нечётной кратности) из-за неудобства закрепления. Подъёмный канат 7 закреплён одним концом на верхней головке грейфера, другим на барабане 12 подъёмной лебёдки. После укладки грейфера на груз включается замыкающая лебёдка 13 на подъём и выбирается канат 8, натяжением которого создаётся усилие в грейферном полиспасте 3, стягивающее навстречу друг другу верхнюю головку 5 и нижнюю траверсу 2. При этом передаются усилия от верхней головки через четыре жёсткие шарнирно закреплённые тяги 4 к челюстям 1. Под действием собственной силы тяжести челюстей и усилий, передаваемых в точках В на челюсти от тяг 4, челюсти поворачиваются относительно шарнира С, соединяющего челюсти с траверсой.
|
|
Во время зачерпывания груза подъёмный канат 7 должен быть ослаблен и двигатель подъёмной лебёдки должен работать на искусственной характеристике с минимальным крутящим моментом, обеспечивающим лишь выбирание слабины.
При подъёме нагрузка в замыкающих канатах должна быть на 10-15% больше, чем в подъёмных, чтобы исключить случайное раскрытие гружённого грейфера во время переноса груза.
Разгрузка грейфера на весу производится при включении замыкающеё лебёдки на опускание при неподвижных подъёмных канатах 7. При ослаблении замыкающих канатов 8 начинает опускаться нижняя траверса 2, что способствует поворачиванию каждой челюсти под действием собственного веса и веса груза относительно шарнира жёсткой тяги 4 с челюстью 1, обеспечивая высыпание груза при раскрытии челюстей.
Зачерпывание груза или закрытие грейфера в подвешенном состоянии возможно в следующих случаях: подъёмный канат неподвижен, а замыкающий навивается на барабан; подъёмный барабан работает на опускание, а замыкающий на подъём; обе лебёдки работают на подъём, но скорость замыкающего каната превышает скорость подъёмного каната.
Разгрузка груза происходит при следующих условиях: подъёмный барабан остановлен, а замыкающий работает на опускание; подъёмный барабан работает на подъём, а замыкающий остановлен; подъёмный барабан работает на подъём, а замыкающий на опускание; подъёмный и замыкающий барабаны работают на опускание, но скорость замыкающего барабана больше, чем подъёмного.
Процесс расчета состоит из нахождения величин необходимых для хорошего функционирования грейфера. Рассчитаем основные из них. Грейфер можно рассматривать как плоский механизм если считать усилие тяги 
Силы смыкания челюстей  в точке С создаётся натяжением замыкающего каната и собственными силами тяжести элементов грейфера а сила сопротивления
в точке С создаётся натяжением замыкающего каната и собственными силами тяжести элементов грейфера а сила сопротивления  действует на грейфер со стороны зачерпываемого материала. Из условия равновесия верхней головки
действует на грейфер со стороны зачерпываемого материала. Из условия равновесия верхней головки  . В связи с тем, что суммарная сила сопротивления
. В связи с тем, что суммарная сила сопротивления  в процессе зачерпывания изменяется по значению и по направлению, то вводят ряд допущений с целью упрощения анализа. Из условия равновесия грейфера получаем
в процессе зачерпывания изменяется по значению и по направлению, то вводят ряд допущений с целью упрощения анализа. Из условия равновесия грейфера получаем  и
и  где
где  сила тяжести грейфера без груза
сила тяжести грейфера без груза  суммарное усилие в обоих замыкающих канатах. Суммарная сила сопротивления будет равна
суммарное усилие в обоих замыкающих канатах. Суммарная сила сопротивления будет равна  . Усилие действующее на нижнюю траверсу
. Усилие действующее на нижнюю траверсу  . Большое значение при проектировании грейфера имеет выбор формы кривой зачерпывания груза определяемой ординатой
. Большое значение при проектировании грейфера имеет выбор формы кривой зачерпывания груза определяемой ординатой  . Стрелу параболы
. Стрелу параболы  определяют из условия полного заполнения номинальной вместимости грейфера:
определяют из условия полного заполнения номинальной вместимости грейфера:
 где
где  размах челюстей. Высота подъёма грейфера за время выбирания слабины поддерживающего каната
размах челюстей. Высота подъёма грейфера за время выбирания слабины поддерживающего каната  где
где  скорость замыкания каната на барабане
скорость замыкания каната на барабане  угловая скорость барабана соответственно при синхронной и номинальной частоте вращения двигателя
угловая скорость барабана соответственно при синхронной и номинальной частоте вращения двигателя  фактический радиус барабана замыкающей и поддерживающих лебёдок.
фактический радиус барабана замыкающей и поддерживающих лебёдок.
Рассмотрим принцип на примере крюкового механизма подъёма, причём приводить все величины будем к валу двигателя. Очевидно, что моменты инерции  (соответственно момент инерции ротора двигателя, муфты, и первое зубчатое колесо). Момент инерции второго зубчатого колеса
(соответственно момент инерции ротора двигателя, муфты, и первое зубчатое колесо). Момент инерции второго зубчатого колеса  приводится из условия равенства кинетических энергий движения приводной массы и его аналога на валу приведения
приводится из условия равенства кинетических энергий движения приводной массы и его аналога на валу приведения  откуда 3)
откуда 3)  где
где  передаточное число от вала I к промежуточному валу II. С учётом КПД
передаточное число от вала I к промежуточному валу II. С учётом КПД  системы от промежуточного вала II до вала приведения получают
системы от промежуточного вала II до вала приведения получают  . Аналогично определяют приведённые моменты инерции масс с моментами
. Аналогично определяют приведённые моменты инерции масс с моментами  Момент инерции третьего зубчатого колеса и барабана:
Момент инерции третьего зубчатого колеса и барабана:  где КПД системы от вала I двигателя к валу III барабана. Поступательно движущаяся масса груза
где КПД системы от вала I двигателя к валу III барабана. Поступательно движущаяся масса груза  приводится к валу I двигателя из условия
приводится к валу I двигателя из условия  где
где  момент инерции массы груза, приведённой к валу I. Если учесть потери в системе посредством КПД
момент инерции массы груза, приведённой к валу I. Если учесть потери в системе посредством КПД  и то что
и то что  получим:
получим:  . 2) Коэффициент жёсткости
. 2) Коэффициент жёсткости  определяется из условия равенства потенциальных энергий действительного упругого звена и его аналога на валу приведения
определяется из условия равенства потенциальных энергий действительного упругого звена и его аналога на валу приведения  где
где  угловые деформации звеньев. Коэффициент жёсткости
угловые деформации звеньев. Коэффициент жёсткости  . Приведённый коэффициент жёсткости поступательного движущегося звена:
. Приведённый коэффициент жёсткости поступательного движущегося звена:  где
где  упругая деформация каната. С учётом КПД системы и связи между и углом поворота барабана получим:
упругая деформация каната. С учётом КПД системы и связи между и углом поворота барабана получим:  где
где  передаточное число от вала I к валу III. Приведённый момент
передаточное число от вала I к валу III. Приведённый момент  на валу двигателя создаваемый силой также определяют из условия
на валу двигателя создаваемый силой также определяют из условия  где
где  и
и  соответственно линейные и угловые перемещения груза и вала двигателя. С учётом КПД и того что
соответственно линейные и угловые перемещения груза и вала двигателя. С учётом КПД и того что  получим
получим  . В большинстве механизмов моменты инерции
. В большинстве механизмов моменты инерции  промежуточных масс малы по сравнению с
промежуточных масс малы по сравнению с  и что позволяет не снижая практически точности расчёта, существенно упростить расчётную схему, сведя её к двумассовой. Если ведётся расчёт звена с коэффициентом жёсткости
и что позволяет не снижая практически точности расчёта, существенно упростить расчётную схему, сведя её к двумассовой. Если ведётся расчёт звена с коэффициентом жёсткости  то
то  . Из этого приведённый коэффициент жёсткости
. Из этого приведённый коэффициент жёсткости  запишем значение каждого из
запишем значение каждого из  получим
получим 
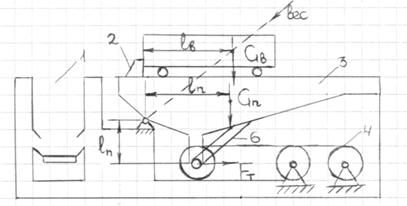
В расчётных схемах механизмов изменения вылета стрелы рис. (а) и поворота рис. (б) приняты обозначения  соответственно массы груза и вращающихся частей механизма (последняя приведена к тяге механизма изменения вылета)
соответственно массы груза и вращающихся частей механизма (последняя приведена к тяге механизма изменения вылета)  приведённые массы стрелы
приведённые массы стрелы  приведённые коэффициенты жёсткости механизма изменения вылета и консольной части стрелы
приведённые коэффициенты жёсткости механизма изменения вылета и консольной части стрелы  сила действующая на систему со стороны двигателя
сила действующая на систему со стороны двигателя  моменты инерции механизма и поворотной части крана без верхней части стрелы. Теоретические и экспериментальные исследования показали, что во многих случаях без заметного снижения точности вычислений расчётные схемы механизмов могут быть сведены к двух массовым без учёта рис. (в) и с учётом рис. (г) зазора
моменты инерции механизма и поворотной части крана без верхней части стрелы. Теоретические и экспериментальные исследования показали, что во многих случаях без заметного снижения точности вычислений расчётные схемы механизмов могут быть сведены к двух массовым без учёта рис. (в) и с учётом рис. (г) зазора  в механизме (где
в механизме (где  приведённые к точкам подвеса груза массы двигателя и стрелового устройства
приведённые к точкам подвеса груза массы двигателя и стрелового устройства  коэффициент жёсткости системы
коэффициент жёсткости системы  приведённые к оси вращения крана моменты инерции механизма поворота и поворотной части крана без груза). В связи с тем что период раскачивания груза на канатах
приведённые к оси вращения крана моменты инерции механизма поворота и поворотной части крана без груза). В связи с тем что период раскачивания груза на канатах  существенно выше периода низшего тона упругих колебаний системы
существенно выше периода низшего тона упругих колебаний системы  т.е.
т.е.  можно раздельно рассматривать эти процессы. При этом переменные нагрузки, вызванные раскачиванием груза на канатах в плоскостях углов
можно раздельно рассматривать эти процессы. При этом переменные нагрузки, вызванные раскачиванием груза на канатах в плоскостях углов  и
и  полагают известными и включают в момент и усилие
полагают известными и включают в момент и усилие  .
.


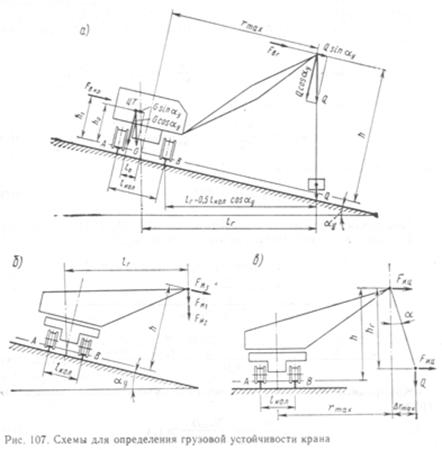
Устойчивость крана при работе с грузом определяется коэффициентом грузовой устойчивости  или
или  . Устойчивость крана без груза, т.е. в нерабочем состоянии определяется коэффициентом собственной устойчивости
. Устойчивость крана без груза, т.е. в нерабочем состоянии определяется коэффициентом собственной устойчивости  . Грузовая устойчивость определяют в наиболее неблагоприятных условиях работы учитывая при этом силу тяжести груза . На кран действуют: сила тяжести его частей
. Грузовая устойчивость определяют в наиболее неблагоприятных условиях работы учитывая при этом силу тяжести груза . На кран действуют: сила тяжести его частей  , ветровая нагрузка на конструкцию
, ветровая нагрузка на конструкцию  , ветровая нагрузка на подвешенный груз
, ветровая нагрузка на подвешенный груз  . Кран устанавливают на пути имеющем в поперечном направлении угол наклона
. Кран устанавливают на пути имеющем в поперечном направлении угол наклона  ребро опрокидывания проходит через точку
ребро опрокидывания проходит через точку  . Коэффициент грузовой устойчивости
. Коэффициент грузовой устойчивости  где
где  моменты создаваемые относительно точки соответственно весом всех частей крана ветровой нагрузкой в рабочем состоянии, силами инерции, силой тяжести груза эти моменты равны:
моменты создаваемые относительно точки соответственно весом всех частей крана ветровой нагрузкой в рабочем состоянии, силами инерции, силой тяжести груза эти моменты равны:
 где
где  моменты создаваемые силами инерции массы груза и массы стрелового устройства. Найдём значения всех коэффициентов грузовой устойчивости:
моменты создаваемые силами инерции массы груза и массы стрелового устройства. Найдём значения всех коэффициентов грузовой устойчивости:
Коэффициент грузовой устойчивости без учёта дополнительной нагрузки

Коэффициент собственной устойчивости определяют для нерабочего состояния крана при отсутствии груза и установки стрелы поперёк путина минимальном вылете

Коэффициент запаса грузовой устойчивости определяют как отношение момента относительно ребра опрокидывания создаваемого весом крана, тележки и груза к моменту сил инерции и сил ветра:

В нерабочем состоянии крана устойчивость проверяют при действии весовых нагрузок моста и тележки без груза и ветровой нагрузки в нерабочем состоянии

К видам плавучих кранов можно отнести краны смонтированные на самоходном и буксируемом понтоне или судне. К особенности их работ можно отнести следующее: плавучий кран может работать как в грейферном так и в крюковом режиме в зависимости от необходимости. Также они могут выполнять следующие операции: перегрузочные работы в портах, дноочистительные выправительные и берегоукрепительные работы, перегружать тяжёлые грузы при строительно-монтажных аварийно-спасательных и др. специальных работах. Теперь о плавучести прежде всего плавучесть это способность понтона с поворотной частью плавать в заданном положении относительно водной поверхности. Плавучий кран будет находиться в равновесии при следующих условиях: равнодействующая  сил тяжести элементов крана (понтона, поворотной части, подвешенного к стреле груза), запасов топлива, смазочных масел, воды равна силе плавучести (силе поддержания); центр тяжести крана и центр величины (центр тяжести вытесненного понтоном воды) расположены на одной вертикале. Первое условие (сумма проекций всех сил на вертикальную ось равна нулю)
сил тяжести элементов крана (понтона, поворотной части, подвешенного к стреле груза), запасов топлива, смазочных масел, воды равна силе плавучести (силе поддержания); центр тяжести крана и центр величины (центр тяжести вытесненного понтоном воды) расположены на одной вертикале. Первое условие (сумма проекций всех сил на вертикальную ось равна нулю)  где
где  удельный вес воды,
удельный вес воды,  коэффициент полноты водоизмещения,
коэффициент полноты водоизмещения,  длина ширина и осадка понтона. Правая часть этой формулы
длина ширина и осадка понтона. Правая часть этой формулы  является силой плавучести (сила поддержания). Левая часть представляет собой
является силой плавучести (сила поддержания). Левая часть представляет собой  силу тяжести она определяется по конструктивным чертежам, каталогам и паспортным данным оборудования. По конструктивным чертежам понтона и поворотной части находят также координаты
силу тяжести она определяется по конструктивным чертежам, каталогам и паспортным данным оборудования. По конструктивным чертежам понтона и поворотной части находят также координаты  центра тяжести каждого из
центра тяжести каждого из  элементов (второе условие). Координаты центра тяжести плавучего крана в целом
элементов (второе условие). Координаты центра тяжести плавучего крана в целом  . Эти координаты определяют для следующих вариантов: 1)Кран в походном положении с уложенной стрелой и с 10,50,100%-ным запасом топлива и смазочных масел 2)Кран в рабочем положении с номинальным грузом на крюке при максимальном вылете стрелы в кормовой, носовой частях и на борт и с 10,50,100%-ным запасом топлива и смазочных масел.
. Эти координаты определяют для следующих вариантов: 1)Кран в походном положении с уложенной стрелой и с 10,50,100%-ным запасом топлива и смазочных масел 2)Кран в рабочем положении с номинальным грузом на крюке при максимальном вылете стрелы в кормовой, носовой частях и на борт и с 10,50,100%-ным запасом топлива и смазочных масел.
Способность понтона с поворотной частью возвращаться в исходное положение после прекращения действия внешних сил вызывающих крен называется остойчивостью. Из-за неуравновешенности стреловой системы при взятии груза на крюк или в грейфер центр тяжести поворотной части практически всегда не совпадает с вертикальной осью Оz. Поэтому появляется кренящий момент  наклоняющий понтон. Этому моменту препятствует момент восстанавливающий
наклоняющий понтон. Этому моменту препятствует момент восстанавливающий  где
где  плечё статической остойчивости. Имеются два понятия остойчивости: статическая (характеризуется восстанавливающим моментом) и динамическая (характеризуется работой совершаемой восстанавливающим моментом при наклоне понтона). При изучении статической остойчивости различают поперечную (при крене) и продольную (при дифференте). За ось статического наклонения понтона при крене и дифференте можно считать линию пересечения площадей ватерлиний
плечё статической остойчивости. Имеются два понятия остойчивости: статическая (характеризуется восстанавливающим моментом) и динамическая (характеризуется работой совершаемой восстанавливающим моментом при наклоне понтона). При изучении статической остойчивости различают поперечную (при крене) и продольную (при дифференте). За ось статического наклонения понтона при крене и дифференте можно считать линию пересечения площадей ватерлиний  и
и  . При наклонении понтона на угол
. При наклонении понтона на угол  центр величины перемещения из точки
центр величины перемещения из точки  в точку
в точку  по кривой называемой траекторией центра величины. Точку m как центр кривизны этой траектории при крене называют поперечным метацентром, а при дифференте продольным метацентром. Возвышение Метацентра m над центром тяжести крана называют начальной поперечной метацентрической высотой
по кривой называемой траекторией центра величины. Точку m как центр кривизны этой траектории при крене называют поперечным метацентром, а при дифференте продольным метацентром. Возвышение Метацентра m над центром тяжести крана называют начальной поперечной метацентрической высотой  . Из геометрических соотношений плечо статической остойчивости
. Из геометрических соотношений плечо статической остойчивости  .
.
Кинематические схемы лифтов представлены ниже. К техническим характеристикам лифтов относятся:
1) грузоподъёмность , 2) скорость передвижения  , 3) высота подъёма
, 3) высота подъёма  , 4) точность остановки плавность движения
, 4) точность остановки плавность движения  , 5) номинальная грузоподъёмность
, 5) номинальная грузоподъёмность 
 где
где  количество пассажиров
количество пассажиров  вес одного пассажира. Скорость передвижения задаётся стандартами
вес одного пассажира. Скорость передвижения задаётся стандартами  . Также существуют и другие скорости: остановочная, предельная скорость, скорость при которой действуют ловители. Точность остановки регламентируется в зависимости от вида перевозимых грузов: для больничных и грузовых лифтов
. Также существуют и другие скорости: остановочная, предельная скорость, скорость при которой действуют ловители. Точность остановки регламентируется в зависимости от вида перевозимых грузов: для больничных и грузовых лифтов  для остальных
для остальных  . Ускорение так же регламентировано при разгоне для больничных и грузовых
. Ускорение так же регламентировано при разгоне для больничных и грузовых  для остальных
для остальных  ; при торможении для больничных и грузовых
; при торможении для больничных и грузовых  для остальных
для остальных  .
.
При проектировании лифта чаще всего применяют верхнее расположение подъёмного механизма. Наиболее распространённая см. рис. лебёдка состоит из двигателя 1, двух колодочного тормоза 2, редуктора 3, и канатоведущих шкивов 4 и 6. Канатоведущий шкив 4 может располагаться консольно на валу червячного колеса. На квадратный хвостовик 5 выходного конца вала червяка надет съёмный штурвал ручного привода лебёдки, используемого в аварийных случаях (при посадке кабины на ловители и для регулирования аппаратуры управления лифтом). Расчётное статическое натяжение в ветви каната, наматываемого на барабан:  где
где  сила тяжести груза соответствующая номинальной грузоподъёмности лифта
сила тяжести груза соответствующая номинальной грузоподъёмности лифта  сила тяжести кабины
сила тяжести кабины  сила тяжести канатов
сила тяжести канатов  сила тяжести натяжного устройства уравновешивающих канатов
сила тяжести натяжного устройства уравновешивающих канатов  число ветвей канатов на которых подвешена кабина или противовес. Сила натяжения в ветви каната противовеса
число ветвей канатов на которых подвешена кабина или противовес. Сила натяжения в ветви каната противовеса  где
где  сила тяжести противовеса
сила тяжести противовеса  сила тяжести канатов противовеса при его нижнем положении в шахте. Сила тяжести противовеса
сила тяжести канатов противовеса при его нижнем положении в шахте. Сила тяжести противовеса  где
где  коэффициент упругости показывающий какая доля полезного груза уравновешивается. Мощность подъёмной лебёдки
коэффициент упругости показывающий какая доля полезного груза уравновешивается. Мощность подъёмной лебёдки  где
где  КПД лебёдки учитывающий потери от преодоления сопротивления в блоках, направляющих и приводе подъёмного механизма.
КПД лебёдки учитывающий потери от преодоления сопротивления в блоках, направляющих и приводе подъёмного механизма.

Роторные вагоноопрокидыватели служат для поворота вагона на 160-170 градусов относительно оси параллельной его пути расположенной внутри контура вагона, груз высыпается через боковую стенку.
Боковые вагоноопрокидыватели поворачивают вагон на 160-170 градусов относительно продольной оси проходящей выше уровня пути и сбоку от вагона, груз высыпается через боковую стенку.
Торцевой вагоноопракидыватель обеспечивает наклон вагона на 50-70 градусов относительно горизонтальной поперечной оси, при котором груз высыпается через откидную торцовую стенку вагона. Спецификация: 3 платформа, 1 приёмное устройство, 4 привод, 2 буферный упор, 5 полиспаст, 6 рамный треугольник. Формула (в ней весь основной расчёт) 
В зависимости от положения грузоподъёмного оборудования относительно ходовой части погрузчики подразделяются на фронтальные и боковые. Основными узлами автопогрузчика являются вилы, грузоподъёмное оборудование, кабина, пульт управления, рулевое управление, сиденье для водителя, двигатель, буксирная скоба, противовес, привод гидронасоса, балка (рама), ось, тормозная система, ведущий мост, рама грузоподъёмника.
В погрузчиках для механизма подъёма используется сдвоенный двукратный полиспаст обратного действия см. рис. (в). Спецификация: сила тяжести груза, 2 внутренняя рама,  вес плунжера, вес каретки, цепи и вил. Общее сопротивление при подъёме груза равно усилию в штоке
вес плунжера, вес каретки, цепи и вил. Общее сопротивление при подъёме груза равно усилию в штоке  . Нам надо рассчитать наибольшее усилие в штоке гидроцилиндра
. Нам надо рассчитать наибольшее усилие в штоке гидроцилиндра  наклона грузоподъёмника которое необходимо приложить в момент обратного поворота его с грузом наклонённого в начале вперед на предельно допустимый угол
наклона грузоподъёмника которое необходимо приложить в момент обратного поворота его с грузом наклонённого в начале вперед на предельно допустимый угол  . При
. При  можно считать
можно считать  и
и  . Из условия равновесия грузоподъёмности
. Из условия равновесия грузоподъёмности  получим:
получим:  . При решении этого уравнения относительно суммарное усилие в штоках обоих параллельно устанавливаемых гидроцилиндров
. При решении этого уравнения относительно суммарное усилие в штоках обоих параллельно устанавливаемых гидроцилиндров