В НЕЛИНЕЙНЫХ СИСТЕМАХ
ЛЕКЦИЯ 24 Одночастотные вынужденные колебания. Частотные характеристики.
План.
1. Случай одночастотных вынужденных колебаний.
2. Пример.
Исследование вынужденных колебаний нелинейных систем представляет собой в общем сложную задачу в связи с отсутствием суперпозиции отдельных решений, а также существенным изменением поведения системы в зависимости от размера амплитуды колебаний, с наличием не единственного установившегося режима и возможностью перескоков с одного режима на другой, с особенностями высших гармоник, субгармоник, комбинационных частот и с многими другими факторами.
В данной лекции мы рассмотрим случай одночастотных вынужденных колебаний, т. е. колебаний нелинейной системы с частотой внешнего периодического воздействия, и найдем условия их существования.
Рассмотрим нелинейную систему с внешним воздействием (рис. 6.1), заданнымв виде
F(t) = В sin wt. (6.1)
Уравнение динамики системы имеет вид

Решение для вынужденных колебаний будем искать приближенно в форме

где w задано, а неизвестными являются амплитуда а и фаза j.

Рис.6.1.
Произведем гармоническую линеаризацию нелинейности:

где коэффициенты q (а) и q’(а) вычисляются для симметричных (нечетных) нелинейностей по прежним формулам (4.11), если в них положить y = wt+j.Для конкретных нелинейностей можно здесь использовать формулы, полученные в лекции 13, 14.
Подставим (6.1), (6.3) u (6.4) в уравнение системы (6.2):

Используем символический метод определения периодического решения, подставив сюда р = jw, а вместо sin wt выражение еjwt. Тогда получим
или

где
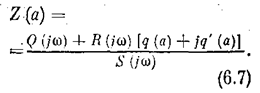
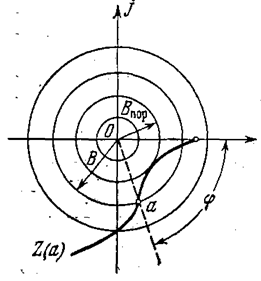
Рис. 6.2.
Уравнение (6.6) с двумя неизвестными а и j можно решить графически, как показано на рис. 6.2. Правая часть (6.6) изображается в виде окружности радиуса В, а левая часть Z(a) строится как кривая по точкам с переменным параметром а. Точки пересечения окружности с кривой Z (a) дают решение, причем величина амплитуды вынужденных колебаний определяется в точке пересечения по отметкам на кривой Z, а фаза—но величине угла (рис. 6.2).
На рис. 6.2 окружности пересекают кривую только при радиусе большем некоторого порогового значения В >Впор- Следовательно, в этом случае одночастотные вынужденные колебания (6.3) возможны только при

Рис. 6.3.

Pиc.6.4.
достаточно большой амплитуде В, а при меньшей амплитуде В внешнего воздействия будет иметь место сложное движение, включающее в себя и собственную частоту системы.
Построив серию кривых Z(a) по формуле (6.7) для разных значений частоты внешнего воздействия w (рис. 6.3), можем построить график зависимости порогового значения В от частоты w, например, в виде, изображенной на рис. 6.4, где wа — частота автоколебаний данной системы. Тогда мы получим область значений Ви а, в которой существуют одночастотные вынужденные колебания. Эта область называется областью захватывания. Явление захватывания состоит в том, что при В > Впор собственные колебания (автоколебания) срываются и система переходит целиком на одночастотные вынужденные колебания с частотой внешнего воздействия. Строго говоря, эти одночастотные вынужденные колебания будут несинусоидальными. В соответствии со свойством фильтра линейной части (лекция 12) они для переменной х будут только близки к синусоидальным (6.3). Обопределении
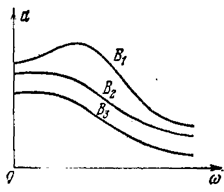
Рис. 6.5.
высших гармоник этих колебаний см. [22].
На основании рис. 6.3 можно построить зависимости а (w) и j(w), т. е. частотные характеристики замкнутой нелинейной системы по первой гармонике (6.3). В линейных системах частотные характеристики А (w) и j(w) не зависели от размера входной амплитуды и вычислялись для единичной амплитуды на входе. В нелинейной же системе характер частотных характеристик А (w)= а (w)/B и j(w) может существенно зависеть от размера В. Поэтому для разных значений В получается серия частотных характеристик (рис. 6.5) замкнутой системы по первой гармонике.
Пример. Пусть уравнение системы имеет вид

при гистерезисной нелинейности (рис. 6.6) и f(t) = B sin wt. Тогда в уравнении (6.6), согласно (6.7), будем иметь

Для заданной частоты w = 10 сек -1 и заданных параметров системы k = 10, с = 10, b = 4, Т1 = 0,01, T2 =0,02, кривая Z (a) изображенана рис. 6.6, где отмечены
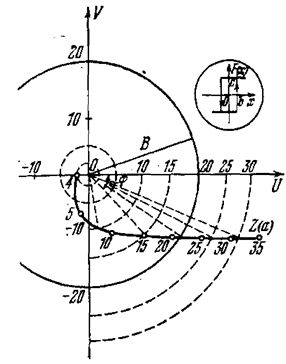
Рис.6.6.
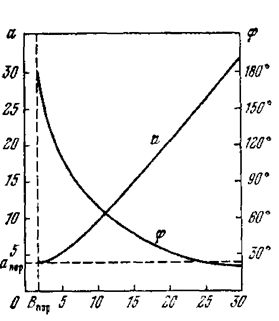
Рис. 6.7.
значения а. Проведя окружности разных радиусов В, по точкам пересечения определим зависимости а (В) и j(В) (рис. 6.7) для вынужденных колебаний при данной частоте.
ЛЕКЦИЯ 25 Процессы управления, сопровождающиеся вынужденными вибрациями.
План.
1. Случай наличия внешнего воздействия.
2. Вибрационное сглаживание и вибрационная линеаризация нелинейности при помощи вынужденных вибраций.
3. Вибрационная помехоустойчивость нелинейной системы.
Рассмотрим случай, когда в системе при наличии переменного внешнего воздействия протекает некоторый процесс управления, а кроме того к системе приложено внешнее периодическое воздействие. Уравнение динамики системы (рис. 6.1) в этом случае получит вид

где f1(t) = B sin wt, а f(t)—медленное по сравнению с f1(t) воздействие, т. е. спектр возможных частот изменения f(t) много меньше w. Решение будем искать в виде

где x° (t) —тоже медленная по сравнению с x* (t) функция времени, определяющая процесс управления при наложенных на него вынужденных вибрациях х*.
Полагая, что основной процесс управления х° (t) протекает настолько медленно, что за один период колебаний х* можно приблизительно считать величину х° неизменной, используем прежние формулы гармонической линеаризации (4.15), а именно

где F °, q n q' вычисляются по формулам (4.16) и (4.17). Для некоторых конкретных нелинейностей эти функции приведены в лекции 13, 14 (примеры 6—10).
Подставив (6.10) u (6.9) в уравнение (6.8), разобьем его на два. Для медленных составляющих.(процесс управления) имеем

а для вибрационных составляющих

Нетрудно видеть, что неизвестные х 0 и а могут быть определены только на основе совместного решения обоих уравнений. Если, решив уравнение (6.12), найти зависимость а (х°) и подставить ее в выражение F ° (x°, a), полученное по формуле (4.16), то найдем новую нелинейную функцию

Тогда уравнение для процесса управления (6.11) примет вид

Оказывается, что нелинейная функция Ф(х°) обладает тем свойством, что она имеет вид плавной кривой (рис. 6.8) для любых нелинейностей F(х), u том число релейных и гистерезисных. Поэтому эту функцию можно линеаризовать обычным порядком, определив крутизну в начале координат (рис. 6.8):
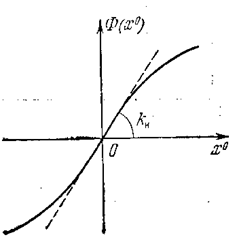
Рис. 6.8.

Но согласно (6.13) имеем

а согласно (4.16)

так как произведение четной функции на нечетную интегрируется за период. В соответствии с этим вместо (6.15) получаем важный результат:
Это значит, что для определении kн не нужно находить зависимости а (х°) и строить новую нелинейную функцию Ф(х °), а достаточно взять частную производную по х° от имеющегося для каждой нелинейности выражения F°(x °, а).
С заменой (6.15) уравнение для процесса управления (6.14) принимает вид линейного уравнения

где kн — коэффициент усиления нелинейности в процессе управления, определяемый по формуле (6.18). Например, Для идеальной релейной характеристики (см. лекции 13, 14)

получим

где ас — амплитуда симметричных вынужденных колебанийв данной системе, найденных согласно лекции 24.
Для релейных характеристик с зоной нечувствительности и с петлей, дифференцируя (4.31), находим

На рис. 6.9 представлена зависимость коэффициента kн, от амплитуды симметричных вынужденных колебаний.
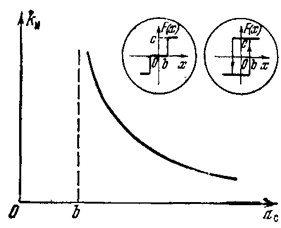
Рис.6.9.

Рис. 6.10
Аналогично для релейной характеристики общего вида (рис. 6.10) получаем

Для кусочно-линейной характеристики с зоной нечувствительности (рис. 6.11) имеем

а для характеристики с насыщением (рис. 6.12)

Итак, пользуясь значениями коэффициента усиления kн, мы можем определять процесс управления в нелинейной системе по линейному уравнению (С. 19) на базе линейной теории. Однако при этом надо учитывать, что коэффициент kн, имеет необычные свойства. В самом деле, как видно из формул (6.20)—(6.24), он зависит от амплитуды симметричных вынужденных колебаний ас.
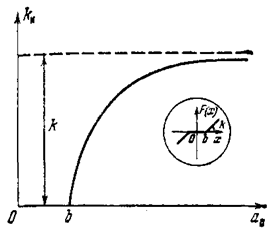
Рис.6.11.
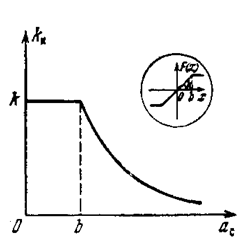
Рис.6.12.
Эта амплитуда в свою очередь, согласно лекции 24, зависит от структуры и параметров линейной части системы (ki, Ti) и еще, что очень важно, от амплитуды В и частоты w внешнего вибрационного воздействия. Поэтомупри синтезе системы (6.19), т. е. при выборе ее структуры и параметров надо знать зависимость

а зная (или выбирая) внешнее вибрационное воздействие. надо учитывать также зависимость

Итак, процесс управления при наложенных на него вынужденных вибрациях исследуется по линейному Уравнению (6.19) без определения зависимости а (х°). Однако если все же необходимо определить величину амплитуды а (х 0), то аналогично уравнению (6.5) решение уравнения (6.12) запишется в виде

Где

Графическое решение получается, как показано на рис. 6.2, с той только разницей, что здесь строится, серия кривых Z (a) для разных значений х°. В результате на пересечениях этих кривых с окружностью радиуса В и определяется искомая зависимость а (х°). Тогда можно, согласно (6.15), найти и нелинейную функцию Ф(х°), если необходимо учесть эту нелинейность в уравнении процесса управления (6.16).
В связи с изложенным па практике часто возникают следующие две важные частные задачи.
Задача 1. Вибрационное сглаживание и вибрационная линеаризация нелинейности при помощи вынужденных вибраций. Свойство плавности функции Ф(х°)(рис. 6.8) как характеристики прохождения медленного сигнала в процессе управления х° (t) через нелинейное
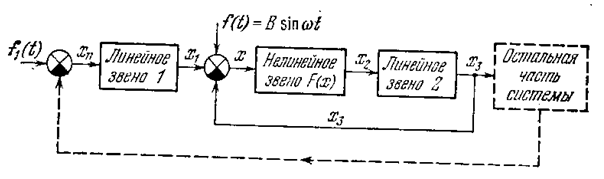
Рис.6.13.
звено при любом очертании нелинейности F(x), имеющей скачки и петли, называется вибрационным сглаживанием нелинейности для процесса управления при наличии вынужденных вибраций. Поскольку за счет этого возникает возможность обычной линеаризации полученной сглаженной характеристики (рис. 6.8) в виде Ф = kн x°, то говорят также о вибрационной линеаризации нелинейности.
В технике вибрационное сглаживание применяют следующим образом. Непосредственно у входа нелинейного звена (например, релейного элемента), как показано на рис. 6.13, прикладывается внешнее вибрационное воздействие f(t) =B sin wt с частотой выше полосы пропускания линейного звена 2. Тогда вынужденные вибрации локализуются во внутренней части системы.
Сигнал на входе нелинейности имеет вид

причем

Отсюда следует, что амплитуда а c и фаза j симметричных вынужденных вибраций переменной х равны соответственно а c = В, j = 0.
Таким образом можно ликвидировать гистерезисную петлю или зону нечувствительности реле (рис. 6.9) и получить для сигнала управления, согласно (6.21), линейную.характеристику с коэффициентом

или же ликвидировать зону нечувствительности (рис. 6.11), получив

Аналогично можно преобразовать сухое трение в трение, пропорциональное скорости, и т. п.
Величину kн можно регулировать амплитудой Ввнешнего воздействия, не выводя ее, конечно, за допустимые пределы. Кроме того, амплитуда В должна быть во всяком случае больше максимально возможного значения сигнала х 0, до которого хотят обеспечить линейность характеристики. Например, для петлевой релейной характеристики (рис. 6.9), согласно (4.31), должно быть В³b+½ х 0½.
Задача 2. Вибрационная помехоустойчивость нелинейной системы управления. Пусть в уравнении нелинейной системы (6.8) f1 (t) = B sin wt представляет внешнюю вибрационную помеху (например, со стороны изгибных вибраций корпуса летательного аппарата, воспринимаемых гироскопом вместе с полезным сигналом по углу тангажа). Характеристическое уравнение системы для полезного сигнала в процессе управления, согласно (6.19), имеет вид
где коэффициент kн, зависит (см. (6.26)) от амплитуды В и частоты w внешней вибрационной помехи. Следовательно, отэтих параметров помехи будет зависеть качество процесса управления и даже устойчивость системы.
Таким образом, если устойчивость чисто линейной системы, какмы знаем, не зависит от внешнего воздействия, то в нелинейной системе устойчивостьможетот него зависеть. Предельное значение амплитудывибрационной
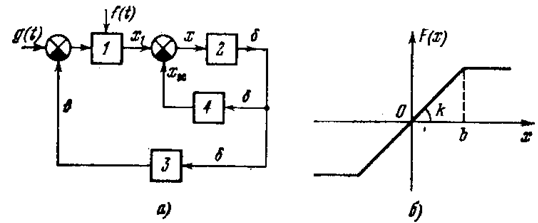
Рис. 6.14.
помехи В, до которой система остается еще устойчивой, называется границей вибрационной помехоустойчивости системы.
В качестве примера определим вибрационную помехоустойчивость самолета с автопилотом. Схема системы изображена на рис. 6.14, а, где 1 — измерители, 2, 4 — привод с обратной связью, 3 — корпус самолета. Уравнение углового движения самолета по тангажу

где J — отклонение самолета по тангажу, d - отклонение руля. Уравнение измерителей

где f(t) = В sin wt — вибрационная помеха (например. измерение гироскопом изгибных вибраций корпуса самолета), g (t) —медленное управляющее воздействие. Уравнение привода руля

где F(x) —нелинейное ограничение скорости привода (рис. 6.14,6).
Если Т= 0,08 с, ачастота вибраций w = 100 с-1, амплитуда вынужденных вибраций на выходе привода руля будет ослаблена в 800 раз. Поэтому можно считать, что вибрации туда не проходят. Следовательно, амплитуду симметричныхвынужденных колебаний на входе нелинейности х можно вычислить по формуле

и для данной нелинейности (рис. 6.14,6), согласно (6.24), получаем

Уравнение привода руля для процесса управления вместо (6.27)примет вид

Характеристическое уравнение всей системы для процесса управления будет иметь пятую степень:

Предпоследний определитель Гурвица

при некоторых числовых значениях параметров системы принимает вид

График зависимости D4(kн) изображен на рис. 6.15, а. Условие устойчивости D4 > 0 выполняется при kн > 13,7. Легко проверить, что при этом положительны и остальные определители Гурвица: их положительность сводится к положительности всех коэффициентов уравнения и неравенству а 1 а 2 - а 0 а 3 > 0.
Из формулы (6.28) находим максимально допустимую амплитуду внешней вибрационной помехи до условию устойчивости kн > 13,7 в виде

где b = 0,5, k1 = 0,9, k2 = 0,4, w = 100, kн min = 13,7, k = 80.
Если при этом расчете системы надо выбрать, например, наилучший коэффициент обратной связи привода koc то указанные вычисления надо провести для разных
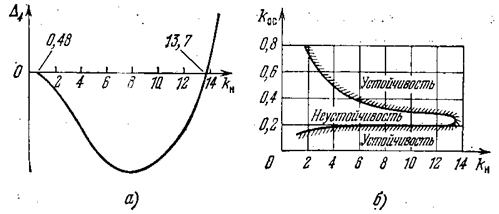
Рис. 6.15.
значений koc, определяя каждый раз граничную величину kн min. Результаты такого расчета приведены в виде графика на рис. 6.15, б. Этот графин дает границу помехоустойчивости системы по коэффициенту kн, которую по выше написанной формуле легко пересчитать на допустимую амплитуду Вmax внешней вибрационной помехи.
ЛЕКЦИЯ 26 Процессы управления в автоколебательных системах.
План.
1. Уравнение динамики системы.
2. Пример.
3. Вибрационное сглаживание и вибрационная линеаризация нелинейности при помощи автоколебаний.
4. Влияние автоколебательных вибрационных помех на устойчивость и качество процесса управления.
Автоколебательные системы довольно часто встречаются среди систем автоматического управления и регулирования, в том числе системы с характеристиками релейного типа. Будем считать, что частота автоколебаний в рассматриваемых системах лежит много выше спектра возможных частот процесса управления. Поэтому будем искать решение для переменной х на входе нелинейности (рис. 6.1) в виде

где x° (t) —медленная переменная по сравнению с x* (t). Уравнение динамики системы (рис. 6.1) имеет вид
Q( p ) x + R( p ) F( x ) = S( p ) f(t), (6.30)
где f(t) — медленная функция времени (по сравнению с х*). Гармоническую линеаризацию нелинейности произведем в предположении, что х° не успевает заметно измениться за период автоколебаний. Тогда, согласно (4.15),

Подставив (6.31) в уравнение системы (6.30), разобьем последнее, как и прежде, на два. Уравнение для медленных составляющих (т. е. для процесса управления) получит вид

Уравнение для периодических составляющих запишется в виде

Три неизвестных функции x° (t), а и w, в искомом решении (6.29) определяются совместным решением уравнений (6.32) и (6.33). Поскольку эти функции взаимосвязаны, причем х° (процесс управления) меняется во времени, то амплитуда а и частота w автоколебаний тоже будут медленно меняться во времени в процессе управления.
Будем рассуждать аналогично нашим рассуждениям в предыдущей лекции. Если путем решения уравнения (6.33) найти зависимость а (х°) и подставить ее в выражение F0(х 0, a), полученное по формуле (4.16), то найдем новую нелинейную функцию
Ф(x 0) = F ° (x 0, a (x°)),
которая оказывается плавной кривой (рис. 6.8) для любых нелинейностей. Применяя к этой функции всю прежнюю процедуру обычной линеаризации (6.17), (6.18), получим

Для конкретных нелинейностей здесь будут справедливы прежние формулы (6.20)—(6.24) и графики (рис. 6.9—6.12), в которых, однако, в отличие от прежнего, величина а сявляется амплитудой симметричных автоколебаний, определяемой для данной системы согласно лекции 15, 16 или 17.
Таким образом, для нахождения коэффициента усиления нелинейности в процессе управления kн в автоколебательной системе нет необходимости искать зависимость а (х°) и строить новую нелинейную функцию Ф (х 0), а требуется знать лишь амплитуду.симметричных автоколебаний а с. В результате уравнение динамики процесса управления в автоколебательной системе вместо нелинейного (6.32) будет линейным:

Однако коэффициент kн обладает особыми свойствами. Он, согласно (6.20)—(6.24), зависит от амплитуды а с, а эта последняя, согласно лекции 15,16, определяется через параметры всей системы. Следовательно, kн зависит также и от структуры и параметров (ki, Ti) линейной части системы, т. е.

Эту особенность надо учитывать при синтезесистемы с использованием линейной теории, а также при исследовании устойчивости и качества процессов управления.
Для определения амплитуды и частоты автоколебаний, которые накладываются на процесс управления, надо использовать уравнение (6.33). Оно полностью совпадает с уравнением (4.65) для несимметричных автоколебаний. Решается это уравнение в общем случае подстановкой l=jw в характеристическое уравнение

после выполнения подстановки и выделения вещественной и мнимой частей получим два уравнения:
Х(w, а, х °) = 0, Y(w, а, х 0) = 0. (6.37)
Отсюда определяются зависимости а(x°) w(х0) причем x0(t)- процесс управления, определяемый дифференциальным уравнением (6.35).
В случае, если нелинейность F( x ) является однозначной это решение упрощается, так как частота автоколебаний w в этом случае не зависит от величины х 0 и от формы нелинейности. Эта частота постоянна в процессе управления и определяется отдельно из уравнения (4.67):

а зависимость а(х °) определяется также отдельно из выражения

куда подставляется значение w, найденное из (6.38)
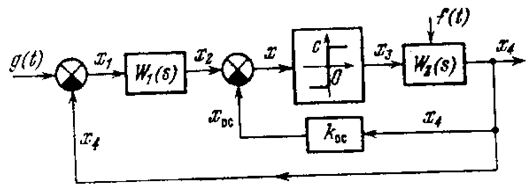
Рис. 6.16.
Пример. Рассмотрим систему с идеальной релейной характеристикой, схема которой приведена на рис. 6.16.
Заданы

и коэффициент жесткой обратной связи kос.
Общее уравнение динамики системы относительно переменной x запишется в виде

Для подстановки и уравнение (6.38) здесь имеем

Поэтому, согласно (6.38), получаем значение частоты автоколебаний

Гармоническая линеаризация нелинейности дает

где, согласно (4.33),

Коэффициент усиления нелинейности в процессе управления Ав, согласно (6.20), вычисляется в виде
где а с—амплитуда симметричных автоколебаний в данной системе.
Из формул (6.39) и (6.41) при х 0 = 0 получаем
откуда с подстановкой (6.40) находим

Следовательно,

Итак, общее уравнение динамики системы относительно переменной х для процесса управления принимает вид

где коэффициент kн выражается через другие параметры системы формулой (6.43). Дальше эту систему можно рассчитывать как обыкновенную линейную, определяя устойчивость и качество процесса управления с соответствующим выбором параметров, учитывая выражение для kн (6.43). Здесь нужно еще иметь в виду ограниченность возможного интервала линеаризации процесса управления, так как из (6.41), например, следует требование х 0< а. Отсюда вытекают требования на соотношение параметров системы в соответствии с формулой для амплитуды (6.42).
Для того чтобы определить амплитуду автоколебаний, наложенных на процесс управления, надо воспользоваться формулой (6.39), которая с подстановкой w (6.40) и q (6.41) дает

откуда определяется зависимость а (х°) в процессе управления.
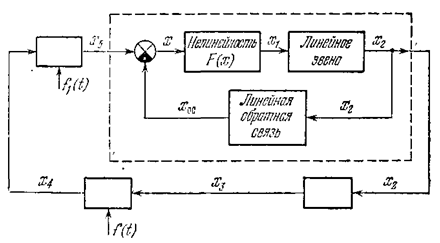
Рис. 6.17.
Рассмотрим и здесь те же две специфические частные задачи, которые рассматривались выше при вынужденных вибрациях.