План.
1. Случай вещественных корней.
2. Случай равных вещественных корней.
3.Случай комплексных корней.
В качестве исходного материала, используемого в дальнейшем при изучении нелинейных систем, рассмотрим особые точки линейных систем второго порядка. Уравнения линейной системы имеют вид

или в векторно-матричной форме

при условии, что матрица А невырожденная, т. е. det А¹ 0 Дифференциальное уравнение фазовых траекторий, согласно (1.5), имеет вид

Единственной особой точкой (точкой равновесного состояния системы) является точка х 1 = 0, х 2 = 0.
Пусть корни l1 и l2 характеристического уравнения

(здесь.Е—единичная матрица) различны. Путем подстановки вида х= Ру где Р — некоторая невырожденная матрица, матрицу А можно привести к диагональному виду. Уравнения (1.5) примут вид:

или

Решением этих уравнений является

Рассмотрим фазовые траектории в этой условной системе координат (у1,у2), а затем отобразим фазовые траектории на плоскость исходных координат (х1,х2)
Случай вещественных корней l1,2 Переходный процесс — апериодический. Пусть

Исключив t из решения (1.7), получим уравнение фазовых траекторий

Если знаки корней l1,2 одинаковы, то с учетом (1.8) имеем l2 /l1 > 1, и фазовые траектории представляются в виде парабол, как показано на рис. 1.15. При этом направление движения изображающей точки М по любой фазовой траектории определяется уравнением (1.7), а именно: случаю l1 < 0, l2< 0 отвечает рис. 1.15,а,

Рис. 1.15.
что соответствует затухающим переходным процессам; случай l1 > 0, l2 > 0 (рис. 1.15,б) соответствует расходящимся переходным процессам. Если же знаки корней l1,2 различны, то в уравнении (1.9) имеем l2/l1<-1, и фазовые траектории имеют вид гипербол (рис. 1.16).
В случае отрицательных вещественных корней (рис. 1.15, а) особая точка 0 называется точкой типа «устойчивый узел».
В случае положительных вещественных корней (рис. 1.15, б) особая точка 0 называется точкой типа «неустойчивый узел».
В случае же вещественных корней разных знаков (рис. 1.16) особая точка 0 называется точкой типа «седло». Седловая точка всегда неустойчива.

Рис. 1.16.
Отобразим полученные фазовые портреты линейной системы на плоскость исходных координат (х 1 ,х 2). Используем тот факт, что оси парабол и асимптоты гипербол (у1,у2) сами являются фазовыми траекториями и при линейном преобразовании останутся прямыми. Их отображение на плоскость (х 1 х 2) примет вид х2 =kx 1. Подставив это соотношение в (1.6), получим
или

откуда находим два значения k 1 и k 2. Это дает две прямолинейные фазовые траектории (рис. 1.17)*)*).

Рис. 1.17.
На рис.1.17 дано расположение также и остальных (криволинейных) фазовых траекторий. Аналогичная картина изображена и на рис. 1.18 для особой точки типа «седло». По какой из фазовых траекторий пойдет переходный процесс в системе, определяется начальными условиями х1(t0), х2(t0), которые дают вам координаты начальной точки Мо (рис. 1.17).
Для уточнения такой качественной картины фазовых траекторий можно применить метод изоклин.

Рис. 1.18.
Изоклиной называется линия, соединяющая точки фазовых траекторий с одинаковым наклоном касательной, т. е. для каждой изоклины dx2/dx1 = с. Поэтому уравнение изоклины, согласно (1.6), имеет вид

Следовательно, любая прямая х2 = kиx1 будет изоклиной с соответствующим значением постоянной с. Задаваясь определенной величиной k и (рис. 1.18), согласно (1.10) находим

Нанеся несколько изоклин и зная для каждой из них крутизну наклона с пересекающих ее фазовых траектории, можно уточнить всю картину фазовых траекторий.
Случай равных вещественных корней: l1=l2. В этом случае получается вырожденный узел, устойчивый при l1,2<0 и неустойчивый при l1,2>0 (фазовые траектории показаны в координатах у1, у2 на рис. 1.19, а, б).

Рис. 1.19.
Случай комплексных корней l1,2. Переходный процесс — колебательный. Пусть

Решения (1.7) принимают комплексный вид

Введя новые переменные с помощью подстановки

преобразуем решение к вещественной форме

где А и g — произвольные постоянные. Перейдем к полярным координатам (r,j). Тогда

Эти выражения описывают логарифмическую спираль, изображенную на рис. 1.20, а для случая a < 0 и на рис. 1.20, б для a > 0.

Рис. 1.20.
В случае комплексных корней с отрицательной вещественной частью (рис. 1.20, а) особая точка 0 называется точкой типа «устойчивый фокус».
В случае комплексных корней с положительной вещественной частью (рис. 1.20, б) особая точка 0 называется точкой типа «неустойчивый фокус».
Для преобразования полученных фазовых портретов в исходную систему координат (х1,х2) воспользуемся методом изоклин. Пусть, например, задана система

Корни характеристического уравнения l1,2=-1±j2.
Обозначив х == х 1,  х 2 приведем систему к виду
х 2 приведем систему к виду

Дифференциальное уравнение фазовых траекторий

Для изоклины х 2 = kи х 1 отсюда находим

Возьмем четыре значения. kи =0, 1, ¥, -1; тогда с = -¥, -7, -2, 3. Соответствующие направления касательных

Рис. 1.21.
к фазовым траекториям показаны на рис. 1.21 стрелками. Ориентируясь по ним, вычерчиваем фазовые траектории. Одна из них изображена на рис. 1.21.
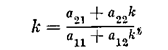
Как частный случай (1.11), при a = 0, т. е. для чисто мнимых корней
l1,2 = ±jb, из (1.12) в полярных координатах на плоскости (z1,z2) получаем
r=A=const. Фазовые траектории имеют вид окружностей (рис. 1.22). При переходе к исходным координатам
Рис. 1.22. Рис. 1.23.
(х1,х2) получатся эллипсовидные замкнутые кривые (рис. 1.23). Это соответствует периодическим во времени процессам. В случае чисто мнимых корней особая точка 0 (рис. 1.22 и 1.23) называется точкой типа «центр».
ЛЕКЦИЯ 4. Особые точки и фазовые портреты нелинейных систем.
План.
1. Фазовые портреты нелинейных систем.
2. Равновесное состояние.
3. Устойчивый и неустойчивый предельные циклы.
4. Автоколебания системы.
Рассмотрим фазовые траектории нелинейной системы второго порядка

Особые точки, отвечающие равновесным состояниям системы, определяются из условия

Для выявления типа каждой особой точки уравнения (1.16) линеаризуются при малых отклонениях координат в окрестности особой точки. Затем определяются корни характеристического уравнения линеаризованной системы, по которым, согласно лекции 3, и устанавливается тип особой точки.
Проведем рассмотрение этого вопроса на примере. Пусть заданы уравнения нелинейной системы

Уравнение фазовых траекторий имеет вид

Найдем особые точки согласно условиям (1,17)

откуда получаем три решения:
1) х= 0, у = 0,
2) x= 1, у = -1,
3) х= -1, у = 1.
Следовательно, система имеет три возможных равновесных состояния.
Исследуем характер особых точек.
1. В окрестности точки х = 0, у = 0 линеаризованные уравнения имеют вид

Характеристическое уравнение:

Корни l1,2 =±j — чисто мнимые. Следовательно, это особая точка типа «центр».
2. В окрестности точки х = 1, у= -1 вводим малые отклонения в координатах x= х -1, h=у+1. Подставляя в уравнения (1.18) х =x+1, у=h-1 и отбрасывая нелинейные члены, получим линеаризованную систему

 .
.
Характеристическое уравнение имеет вид

Корни характеристического уравнения

вещественны и имеют разные знаки. Следовательно, это особая точка типа «седло».
3. Рассматривая линеаризованную систему в окрестности точки х =- 1, у=1, подстановкой в уравнение (1.18) х =x-1, у=h+1 приходим к тому же уравнению, что и в предыдущем случае. Следовательно, здесь тоже особая точка типа «седло».
Найдем асимптоты фазовых траекторий в седловых точках. Положив h= kx,, из уравнения фазовых траекторий
получим
или

откуда находим


Рис. 1.24.
На рис. 1.24 эти асимптоты показаны в окрестностях соответствующих особых точек. Точка же (0, 0) типа «центр» должна быть окружена замкнутыми кривыми. Исходя из этого, на рис. 1.25 изображен примерный ход фазовых траекторий на всей плоскости.
Для определения направления движения изображающей точки по фазовым траекториям достаточно исследовать какую-либо одну точку. Возьмем, например, точку х = 0, у = 1. Согласно уравнениям (1.18) в этой точке имеем dx/dt = -2, dу /dt = 1, т. е. х изменяется в сторону уменьшения, а у- в сторону увеличения. В соответствии с этим и поставлена стрелка па фазовой траектории, проходящей через точку (О, 1), а так как система непрерывна, в ту же сторону будут направлены и все соседние фазовые траектории.
Таким образом выясняется качественная картина фазовых траекторий. Отметим, что в данном примере ни одно из трех возможных равновесных состояний системы не является устойчивым.

Рис. 125.
Методом изоклин можно уточнить очертания фазовых траекторий. Уравнение изоклины, согласно (1.19), имеет
| вид |

где с—крутизна наклона (dy/dx) пересекающих изоклину фазовых траекторий. Например, значению с = 1, т. о. углу наклона траекторий, равному 45°, соответствует, согласно (1.20), изоклина, описываемая уравнением

Она проходит через все три особые точки (штриховая линия на рис. 1.25). В отличие от линейных систем, здесь изоклина криволинейная.
Отметим теперь некоторые общие особенности процессов в нелинейных системах.

Рис. 1.26.
Прежде всего, это возможность наличия двух пли нескольких равновесных состояний (особых точек), как уже было видно на приведенном примере. В соответствии с этим на фазовой плоскости получаются области с различными типами фазовых траекторий. На рис. 1.25, например, эти области разделены жирно обозначенными кривыми. Такие особые кривые, разделяющие области с разными типами фазовых траекторий, называются сепаратрисами.
Существуют и другого типа особые кривые. Важным типом особых кривых являются предельные циклы — замкнутые кривые, соответствующие периодическим процессам, в окрестности которых имеют место колебательные переходные процессы. Если эти фазовые траектории
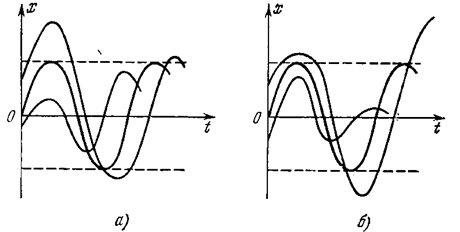
Рис. 1.27.
изнутри и снаружи сходятся к данному предельному циклу (рис. 1.26, а), то мы имеем устойчивый предельный цикл. Если же они удаляются в обе стороны (рис. 1.26, б),— неустойчивый предельный цикл. Возможен и случай двух предельных циклов (рис. 1.26,в), из которых один устойчивый (в данном случае внешний), а второй неустойчивый.
Особая точка О на рис. 1.26 представляет собой в первом случае неустойчивое равновесное состояние, а во втором и третьем — устойчивое. Картина процессов во времени, соответствующая рис. 1.26, а, б, изображена на рис. 1.27, а, б.
Физический смысл устойчивого периодического процесса, отвечающего предельному циклу,— автоколебания системы. Это собственные периодические колебания, происходящие при отсутствии внешнего периодического воздействия, причем амплитуда и частота автоколебаний не зависит от начальных условий, а определяется внутренними свойствами системы. Автоколебания могут возникать только в нелинейных системах. Что же касается линейных систем, то в них собственные периодические колебания возможны только на границе устойчивости (l1,2 =±jw), причем амплитуда их определяется начальными условиями (см. рис. 1.23).
Физический смысл неустойчивого предельного цикла совсем иной.Как видно из рис. 1.26, б, неустойчивый предельный цикл — это граница областей начальных условий. При начальных условиях х (to), у(to), лежащих внутри неустойчивого предельного цикла, получается затухающий переходный процесс, если же они лежат снаружи — расходящийся. Следовательно, равновесное состояние О в данном случае устойчиво при небольших начальных отклонениях, а при больших — система неустойчива. Говорят: система устойчива «в малом» и неустойчива «в большом».
Здесь важно отметить, что, в отличие от линейных систем, типы динамических процессов нелинейных систем могут существенно зависеть от начальных условий.
Интересно далее отметить, что в первом случае (рис. 1.26, а) единственным устойчивым установившимся состоянием системы является автоколебательный режим. Во втором случае (рис. 1.26, б)—равновесное состояние О. В третьем же случае система имеет два устойчивых установившихся состояния: равновесное О, и автоколебания с большой амплитудой (внешний предельный цикл). Какой из них установится, зависит от начальных условий.
В первом случае говорят, что имеет место «мягкое возбуждение» автоколебаний (т. е. при любых начальных условиях), а в третьем случае—«жесткое возбуждение» автоколебаний, так как, чтобы система вышла на них, необходимо начальные условия «забросить» за пределы внутреннего неустойчивого предельного цикла.
Все это будет проиллюстрировано в последующих главах на примерах систем автоматического регулирования. Кроме того, будут проиллюстрированы и многие другие особые свойства нелинейных систем, как, например, отрезки равновесия, скользящие процессы, а также особенности, связанные с вынужденными колебаниями и с процессами управления, в которых, в отличие от линейных систем, не соблюдается принцип суперпозиции.
ЛЕКЦИЯ 5 Переходные процессы и автоколебания релейной системы.
План.
1. Переходные процессы в релейных системах.
2. Линии переключения.
3. Частные случаи релейных характеристик.
В данной главе исследование переходных процессов на фазовой плоскости иллюстрируется на примерах общего характера, выявляющих основные отличительные особенности процессов в нелинейных автоматических системах.
Рассмотрим систему с релейной характеристикой общего вида. Уравнение динамики объекта (рис. 2.1, а) имеет вид

,а уравнение регулятора

где F(x) — релейная характеристика (рис. 2.1,6). Общее

Рис. 2.1.
уравнение динамики системы найдем, если продифференцируем уравнение (2.1) и затем подставим в него (2.2). В результате получим выражение

которое можно представить в виде

Отсюда получим дифференциальное уравнение фазовых траекторий

Как видно из заданной характеристики (рис. 2.1,6), нелинейную функцию F(x) можно описать следующим образом:
если у = dx/dt > 0, то
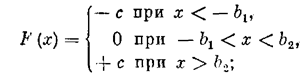
если у == dx/dt < 0, то

В связи с этим на фазовой плоскости (х,у) можно выделить три области: (1) F(x)= -с; (2) F(x)=0; (3) F(x) = +с. Эти три области разделены прямыми (на рис. 2.2 они показаны штриховой линией), которые называются линиями переключения.
Такую фазовую плоскость называют многолистной. На каждом листе (1, 2, 3) получится свой вид фазовых траекторий. По линиям переключения эти листы «сшиваются». Фазовые траектории непрерывно переходят с одного листа на другой (за исключением некоторых особых случаев, где они встречаются).
В области 1(F(x)= -с) уравнение (2.4) принимает вид

Проинтегрировав его, получим уравнение фазовых траекторий в области 1:

Фазовые траектории имеют асимптоту у= k1С, к которой они стремятся при неограниченном увеличении х. Такие фазовые траектории изображены в области 1 на рис. 2.2. Направление их определяется в соответствии с рассмотренным выше правилом (лекция 2, рис. 1.9). 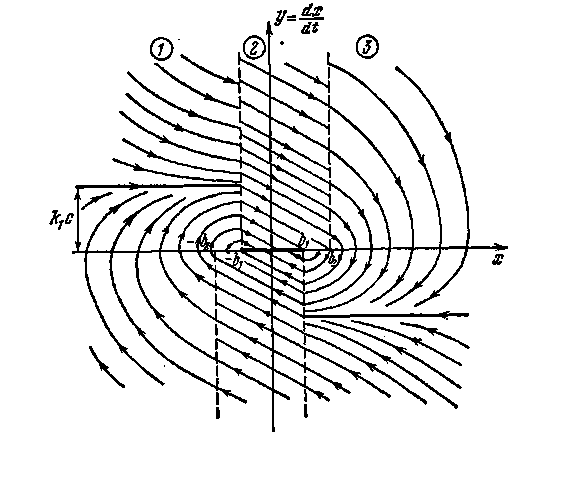
Рис. 2.2.
В области 2 ( F(x)=0) уравнение (2.4) примет вид

Фазовые траектории - прямолинейные отрезки (см. область 2 на рис. 2.2).
Наконец, в области 3 (F (х)= +с) уравнение (2.4) примет вид

откуда, аналогично (2.5), уравнение фазовых траекторий будет

Фазовые траектории в области 3 стремятся к асимптоте у= - k1C при уменьшении х (на рис. 2.2).
В целом фазовые траектории принимают спиралевидную форму. Это соответствует затухающим колебательным процессам.

Рис. 2.3.
Однако колебательный процесс затухает не до нуля, а до некоторого произвольного значения (рис. 2.2, 2.3) в интервале –b1 < х < b1, у= 0, т.е. внутри зоны нечувствительности реле (рис.2.1,б). Таким образом, вместо особой точки здесь получается особый отрезок равновесных состояний, показанный утолщенной линией на рис. 2.2. По какой из фазовых траекторий пойдет переходный процесс в системе, определяется начальными условиями х (to), у (to).

Рис. 2.4.
Рассмотрим теперь частные случаи.
В случае релейной характеристики с зоной нечувствительности без петель (рис. 2.4, а) картина фазовых траекторий будет аналогична изображенной на рис. 2.2, с той разницей, что теперь b1= b2= b, т. е. линии переключения будут прямыми без излома на оси х. В случае чисто петлевой гистерезисной релейной характеристики (рис. 2.4,6) будет отсутствовать область 2 (рис. 2.2). В этом случае имеем

когда

когда

Этим определяются линии переключения (штриховые линии на рис. 2.5). Слева от них строим фазовые траектории по уравнению (2.5), а справа — по уравнению (2.6). Это и показано на рис. 2.5. Поскольку ясно видно, что снаружи фазовые траектории образуют сходящиеся спирали, а изнутри расходящиеся, то где-то среди них должен быть предельный цикл, к которому они все сходятся. Он выделен утолщенной замкнутой линией (рис. 2.5). Это устойчивый предельный цикл, отвечающий автоколебаниям. Амплитуда их определяется точкой пересечения предельного цикла с осью х. Физически такое решение оправдано, ибо в соответствии с нелинейной характеристикой (рис. 2.4, б) реле не имеет равновесного состояния. Автоколебания происходят около петли реле с амплитудой, несколько превышающей половину ширины петли b.

Рис. 2.5.
Установившийся режим работы такой системы автоматического регулирования является автоколебательным. Так работают, например, вибрационные регуляторы напряжения сети постоянного тока. Параметры системы должны быть выбраны так, чтобы амплитуда и частота автоколебаний находились в допустимых пределах.
ЛЕКЦИЯ 6 Система со скользящим процессом.
План.
1.Уравнения динамики.
2.Фазовый портрет системы.
3.Скользящий процесс.
Проиллюстрируем понятие скользящего процесса на простом примере.

Рис. 2.6.
Пусть задана система автоматического регулирования (рис.2.6), уравнения динамики которой имеют вид

Эти уравнения можно представить в виде

Дифференциальное уравнение фазовых траекторий:

Линия переключения на фазовой плоскости (х, у), следовательно, описывается уравнением

Она показана на рис. 2.7. Справа от этой линии х+ kос > 0. Поэтому уравнение фазовых траекторий (2.8) примет вид

откуда

Таким образом, фазовые траектории — это параболы, ветви которых направлены в отрицательную сторону оси х. Положение вершины параболы определяется произвольной постоянной С 1, т. е. начальными условиями переходного процесса х (to), у(to).Эти параболы изображены 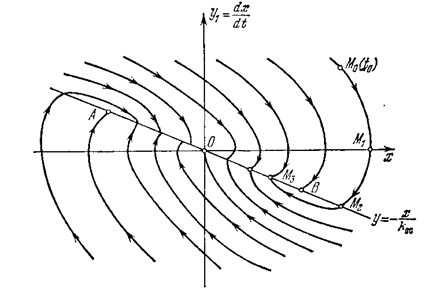
Рис. 2.7.
на рис. 2.7 справа от линии переключения. Направление движения изображающей точки М по параболам определяется прежним правилом (стр. 15, 16, рис. 1.9).
Слева от линии переключения х+ kосу<0, и уравнение фазовых траекторий (2.8) имеет вид

Эти параболы также изображены на рис. 2.7 слева от линии переключения. Видно, что на отрезке линии переключения АВ фазовые траектории встречаются, упираясь в этот отрезок. Это можно расшифровать следующим образом. Пусть процесс идет по фазовой траектории 1(рис. 2,8). Как только фазовая траектория пересечет линию переключения ОА, вступит в своп права фазовая траектория 2, которая вернет процесс к отрезку ОА. По тут встретится фазовая траектория 3 и т. д. В результате изображающая точка путем вибраций около линии переключения переместится к началу координат О.
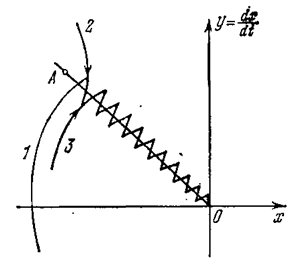
Рис. 2.8.
Такой ход процесса соответствует переключениям релейного элемента (рис. 2.6, б) с большой частотой. Теоретически частота переключения бесконечна, а амплитуда вибраций, изображенных на рис. 2.8, стремится к нулю. Следовательно, теоретически изображающая точка скользит по линии переключения к началу координат — к равновесному состоянию. Процесс такого рода называется скользящим процессом.
Найдем закон движения в скользящем процессе. На линии переключения, согласно (2.9), если учесть первое из уравнений (2.7), имеет место уравнение

Решением этого уравнения является

где значения t =0 и х = х 0 считаются в момент попадания изображающей точки на линию скользящего процесса. Итак, скользящий процесс происходит по экспоненциальному закону.
Здесь важно отметить следующее. Нелинейная система второго порядка (2.7) на участке скользящего процесса вырождается в линейную систему первого порядка (2.10). При этом закон движения в скользящем процессе не зависит от параметров прямой цепи системы и определяется только коэффициентом обратной связи. Например, при начальном положении Мо (рис. 2.7) получим фазовую траекторию Мо М1 М2 М3, переходящую в скольжение по линии M 3О. Такой фазовой траектории соответствует процесс во времени x(t), изображенный на рис. 2.9, где, как и ранее, отмечены характерные точки.

Рис. 2.9.
Найдем положение концов отрезка скользящего процесса А и В на фазовой плоскости (рис. 2.7). Очевидно, что в этих точках касательные к параболам совпадают с линией переключения. Это условие, согласно (2.9), можно записать в виде

тогда из уравнения фазовых траекторий (2.8) получим для точек А и В соответственно условие (2.11) в виде
Следовательно, отрезок скользящего процесса АВ тем больше, чем больше коэффициенты усиления прямой цепи и обратной связи.
ЛЕКЦИЯ 7 Система с логическим управлением. Учет временного запаздывания.
План.
1. Система угловой стабилизации объекта.
2. Идеальная работа системы управления.
3. Временное запаздывание в системе управления.
Рассмотрим автоматическую систему угловой стабилизации объекта в среде без сопротивления (стабилизация аппарата в космосе). Структурная схема системы изображена на рис. 2.10. Уравнение динамики объекта, т. е. уравнение вращения объекта вокруг своей оси, имеет вид

где J- момент инерции, w- угловая скорость, М- вращающий момент со стороны системы управления. Будем считать, что вследствие некоторых внешних возмущений объект начал вращаться (например, в результате неидеальности процесса отделения от носителя при запуске), и рассмотрим его стабилизацию с помощью системы управления при отсутствии внешних возмущений.

Рис. 2.10.
Система управления (рис. 2.10.) состоит из двух измерителей: измерителя угла j и измерителя угловой скорости w, с которых сигналы u1 и u2 снимаются в релейной форме, показанной на рис. 2.11. Эти сигналы поступают в логическое устройство, вырабатывающее нелинейный закон управления в виде некоторой логической функции Ф(j,w), которая служит управляющим воздействием на включение и выключение газовых сопел, создающих вращательный момент М.
Логическая управляющая функция Ф(j,w) может быть сформирована в различных видах. В простейшем случае можно сформировать ее, как показано на рис. 2.12, использовав для переключении скачки сигналов u1 и u2 (рис. 2.11) при j= ±b1 и w=±b2. При этом Ф=1 соответствует созданию управляющего момента в положительном направлении (против часовой стрелки), Ф= -1 - в отрицательном направлении и Ф=0 - отсутствию момента (все сопла выключены).
Указанный выбор логической функции Ф диктуется следующими соображениями. В нулевой зоне -b1<j< b1 (рис. 2.11 и 2.12) сигнала от датчика угла устанавливаем Ф = 0, так как объект находится вблизи требуемого положения j=0, и регулирующее воздействие не требуется. В I квадранте (рис. 2.12) имеем j > 0 и w= d j/ dt > 0. Следовательно, угол j увеличивается во времени - объект уходит от требуемого положения. Здесь устанавливаем Ф= -1 (направление вращающего момента противоположно направлению угловой скорости w).

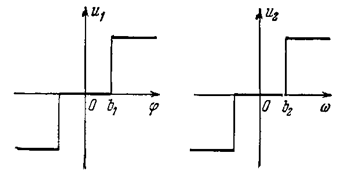
Рис. 2.11.
Аналогично в III квадранте, где знаки j и w отрицательные, включается Ф = +1.
Что касается IV квадранта (рис. 2.12), то там j > 0 и w= d j/ dt < 0, т. е. объект сам возвращается к требуемому положению j=0. Здесь можно обойтись без управляющего момента. Устанавливаем Ф=0. Границей между областью Ф= -1 (в I квадранте) и областью Ф=0 (в IV квадранте) назначаем величину w= -b2 (рис. 2.12), когда сигнал с датчика угловой скорости имеет перескок с нуля к отрицательному значению (рис. 2.11).Аналогично поступаем и во II квадранте (рис. 2.12).
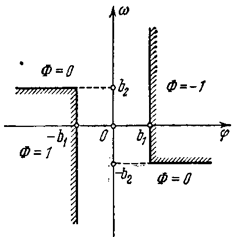
Рис. 2.12.
В соответствии с этой схемой строится логическое устройство (рис. 2.10). Его функционирование можно описать таблицей выходного сигнала Ф в зависимости от входных:
| Сигнал U2 от w | Сигнал U1 от j | ||
| - | + | ||
| - | +1 | ||
| +1 | -1 | ||
| + | -1 |
Здесь приведен пример простейшей логики формирования закона управления. Можно выбирать и другие, более сложные, в зависимости от требований, предъявляемых к системе по экономичности, точности, быстродействию и т.п.
Рассмотрим идеальную работу системы управления (без запаздывания сигналов по всей цепи звеньев). В этом случае уравнение системы управления запишется в виде

где М1=const - величина управляющего момента, который создается включаемыми на постоянную тягу газовыми соплами; Ф(j,w) - логический закон управления, определяемый в данном случае приведенной выше таблицей или согласно графику рис. 2.12.
Общее уравнение системы, согласно (2.12) и (2.13), можно записать в виде

Физический смысл величины с — постоянное угловое ускорение вращения объекта под действием момента M 1. Дифференциальное уравнение фазовых траекторий:

Фазовую плоскость ограничим по оси абсцисс значениями -p £ j £ p (рис. 2.13), причем для вращающегося тела точки (j=±p совпадают.*)*) Этим охватывается полный оборот объекта.
В области, где Ф= -1 (рис. 2.13), уравнения (2.15)
принимают вид

вследствие чего фазовые траектории являются параболами

В области, где Ф= +1, имеем фазовые траектории

Наконец, в области, где Ф == О, получаем прямые линии

Все указанные траектории приведены на рис. 2.13.

Рис. 2.13.
Рассмотрим ход процесса. Пусть начальные условия определяются точкой N0 (рис. 2.13). Процесс пойдет согласно фазовой траектории N0 - 1 - 2. Точка 2 (j=+p) при вращении совпадает с точкой 2 ' (j= -p). Поэтому дальше процесс пойдет в соответствии с фазовой траекторией 2 – 3 – 4 – 5. Как видно из рис. 2.13, точка N1, в которой угол j равен начальному (в точке N0), означает, что объект совершил один полный оборот. Затем (траектория N1 –3 –4 –5 ) он начал колебательное движение около своей оси. Начиная с точки 5, получаем замкнутую фазовую траекторию 5 –6 –7 –8 –5. Следовательно, объект входит в установившийся автоколебательный режим с амплитудой

Своеобразие этого предельного цикла состоит, во-первых, в том, что снаружи фазовые траектории приближаются к нему не асимптотически, как было ранее в других задачах, а за конечное число колебаний (и за конечное время). В описанном выше процессе это было за один оборот плюс один размах колебания. Своеобразие этого предельного цикла заключается также в том, что фазовые траектории внутри него тоже замкнутые и окружают отрезок равновесия DE. Поэтому при малых начальных отклонениях, лежащих внутри предельного цикла, получаются периодические колебания, определяемые начальными условиями. В частности, состояние равновесия, возможное только при w0=0 и -b1<j0<b1, не является устойчивым. Особый отрезок DE имеет здесь свойства, аналогичные особой точке типа «центр» (рис. 1.17). Итак, установившимся режимом в данной системе являются автоколебания с амплитудой (2.19).
Введем теперь в рассмотрение временное запаздывание в системе управления. Пусть t1 - величина запаздывания при включении газовых сопел, а t2 - при их выключении (t2>t1). Поскольку к линии включения сопел (j=b1) (рис. 2.13) объект подходит с постоянной скоростью (горизонтальные фазовые траектории), то за счет запаздывания включения сопел t1 он перейдет за эту линию на величину Dj=wt1. Это значит, что линия включения займет теперь в координатах (j,t1) наклонное положение (рис. 2.14). Аналогично и в III квадранте.
К линии же выключения сопел w= -b2 объект подходит с постоянным ускорением — с (параболическая фазовая траектория). Поэтому за счет запаздывания выключения сопел та он перейдет за эту линию на величину Dw= -сt2. Следовательно, линия выключения сопел w= -b2 сместится вниз (рис. 2.14). Аналогично в левой полуплоскости линия выключения w=b2 сместится вверх на величину Dw=ct2.

Рис. 2.14.
В соответствии с этим на рис. 2.14 нанесены фазовые траектории. Видно, что предельный цикл за счет запаздываний увеличился в размерах. Амплитуда его

вместо прежней (2.19).
Изменится картина фазовых траекторий и внутри предельного цикла. Там включение сопел будет происходить на линиях FG и F1G1. Выключение же - на линиях FH и F1H1 которые получаются от перехода парабол за линии (j=±b1 на Dw=  ct2 соответственно, причем отрезок D (рис. 2.14) определяется по формуле
ct2 соответственно, причем отрезок D (рис. 2.14) определяется по формуле

В результате внутри предельного цикла получаются расходящиеся спиралевидные фазовые траектории. Это соответствует расходящимся колебаниям системы, переходящим в предельный цикл. Здесь, как и в предыдущем случае, система попадает в автоколебательный режим извне не асимптотически, а за конечное число колебаний.
Рассмотренный подход к учету на фазовой плоскости временного запаздывания в системе эквивалентен в какой-то степени исследованию некоторых свойств системы выше второго порядка. Примерно таким же образом может влиять на поведение системы учет постоянных времени в системе управления.
Аналогичным способом можно производить учет временного запаздывания и в релейных системах автоматического управления.
ЛЕКЦИЯ 8. Системы с переменной структурой.
План.
1. Понятие переменной структуры.
2. Форма скользящего процесса.
Переменная структура системы дает дополнительные возможности получения различных желаемых процессов автоматического управления п регулирования. Допустим,

Рис. 2.15.
в системе предусмотрены две разные структуры, различающиеся звеньями 1 и 2 (рис. 2.15). Имеется логическ