Известны:
1. Кинематическая схема рычажного механизма (рис.1).
2. Длины звеньев LOA, LAB, LBD; координаты неподвижных точек ХС, YC, YD; положения центров масс звеньев S1, S2, S4, S5.
3. Частота вращения вала двигателя nдв.
4. Массы звеньев кривошипа m1, кулисы m2,шатуна m4, ползуна m5 (масса камня 3 не учитывается).
5. Моменты инерции звеньев относительно центров масс кривошипа IS1, кулисы IS2, шатуна IS4.
Требуется:
Определить силы реакций во всех кинематических парах механизма и уравновешивающую силу PУР, приложенную к кривошипу 1 в точке А.
ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ
При проведении силового анализа рычажных механизмов используют так называемый кинетостатический метод. Суть его заключается в том, что для проведения силового анализа подвижной системы (в качестве которой выступает механизм) составляются и решаются уравнения статики.
Согласно структурной классификации рычажных механизмов любой из них состоит из начального (или нескольких начальных) механизма и присоединенных к нему одной или нескольких структурных групп (или групп Ассура) – кинематических цепей с нулевой степенью подвижности, являющихся статически определимыми системами.
Прежде чем проводить силовой анализ механизма, необходимо знать все внешние силы, действующие на его звенья. Среди них: силы инерции и моменты сил инерции, силы веса, силы полезного сопротивления, силы трения. Для нахождения сил инерции и моментов сил инерции необходимо знать не только массы и моменты инерции звеньев, но и их ускорения. Поэтому предварительно решаются задачи о скоростях и ускорениях.
2.1. Построение плана механизма, планов скоростей
и ускорений (рис.8 - 10)

План механизма строится в заданном положении в выбранном масштабе длин МL (см. Лист 1). Положение механизма или определяется заданием, или дается преподавателем.
План скоростей механизма можно взять из первой части курсового проекта (смотри Лист 1), но построить его повернутым на 90° (в любую сторону) (рис.9).
План ускорений также можно перенести из листа 1 в том же масштабе (рис.10).
Определяются ускорения центров масс звеньев:
для кривошипа 1 величина его аS1 = 0, так как точка S1 (центр масс) неподвижна;
для кулисы 2 величина ускорения аS2 = аВ (уже определена при выполнении листа 1);
для шатуна 4 величину ускорения аS4 определяем, используя план ускорений и теорему подобия, а именно составляем уравнение пропорции:
b'd'/BD=b'S4'/BS4,
откуда находим длину отрезка b'S'4; он откладывается на плане ускорений. Вектор PaS4' и будет ускорением точки S4. Вычисляется величина ускорения
а S4=(PaS4') . Ma.
2.2.Определение внешних сил, действующих на механизм
В качестве внешних сил, действующих на механизм, в данном примере выступают:
а) сила полезных сопротивлений PПС, эта сила задана по условию задачи;
б) силы веса звеньев, они (более точно – главные векторы этих сил) приложены к центрам масс звеньев и направлены вертикально вниз; величина их определяется по формулам вида
Gi = - mi . g,
где g=9,81 м/с2 - ускорение свободного падения;
в) силы инерции, главный вектор сил инерции приложен к центру масс звена, вычисляется по формулам вида
PUi = - mi . aSi
и направлен в сторону, противоположную ускорению центра масс. (В дальнейшем для краткости главный вектор сил инерции будем называть просто силой инерции);
г) кроме того, на звенья, совершающие не только поступательное, но и вращательное движение (в нашем примере звенья 1, 2, 3 и 4), могут действовать и моменты от сил инерции, которые вычисляются по формулам вида
MUi = - ISi . ei.
Знак минус означает, что вектор момента сил инерции направлен в сторону, противоположную угловому ускорению звена ei;
г) силы и моменты сил трения в кинематических парах механизма;
д) силы сопротивления среды (в рассматриваемом примере два последних вида сил не учитываются).
Для проведения силового анализа механизма должны быть вычислены следующие параметры:
силы веса: G1 = m1 . g; G2 = m2 . g; G4 = m4 . g; G5 = m5 . g, Н;
силы инерции PU2 = m2 . aS2; PU4 = m4 . aB; PU8 = m5 . aD, Н;
моменты сил инерции MU2 = I S2 . e2; MU4 = I S4 . e4, Нм.
Так как центр масс кривошипа S1 неподвижен, то величина его ускорения aS1 = 0, и тогда сила инерции PU1 = m1 . aS1 = 0.
Векторы всех как заданных, так и рассчитанных внешних сил и моментов наносятся на план механизма (рис.8). Силы инерции направлены противоположно направлениям ускорений: PU2 – параллельно Pab', PU4 – параллельно PaS4'; PU5 - параллельно Pad'. Моменты сил инерции MU2 и MU4 направлены противоположно угловым ускорениям e2 и e4.
Для проведения дальнейшего анализа удобно заменить силу инерции и момент сил инерции, действующие на звено, одной равнодействующей силой. Это можно сделать двумя способами:
способ первый - перенос силы PUi на плечо, вычисляемое по формуле
hi = MUi /(PUi . ML), мм.
В рассматриваемом примере вычисляются плечи сил: для кулисы 2
h2 = MU2 /(PU2 . ML)
и для шатуна 4
h4 = MU4/ (PU4 . ML), мм.
На эти расстояния переносятся силы инерции. Получают точки приложения равнодействующих сил К2'и К4' соответственно;
способ второй – с использованием теоремы о центре качания звена. Используя теорему подобия, определяют мгновенные центры ускорений звеньев p2 и p4 (рис.8). Затем определяют положения точек К2 и К4, через которые должны проходить равнодействующие силы PU2 и PU4 по следующим выражениям:
 ,
,  .
.
В дальнейших расчетах (после замены сил и моментов одной равнодействующей силой) моменты сил инерции уже не учитываются.
2.3. Силовое исследование механизма
2.3.1. Последовательность силового исследования
Силовое исследование механизма ведется в следующей последовательности: сначала проводится силовой анализ наиболее удаленной от ведущего звена структурной группы, затем - следующей структурной группы. Заканчивают силовым анализом ведущего звена.
В рассматриваемом примере сначала проводится силовой анализ структурной группы 2 класса 2 вида, состоящей из звеньев 4 и 5, затем - структурной группы 2 класса 3 вида, состоящей из звеньев 2 и 3, и заканчивают анализом ведущего звена 1.
2.3.1.1. Силовой анализ структурной группы 2 класса 2 вида.
Структурная группа 2 класса 2 вида, состоящая из шатуна 4 и ползуна 5, изображается на чертеже в масштабе МL в заданном положении (рис.11).
На чертеж структурной группы наносятся все известные внешние силы (в рассматриваемом примере это PU4,G4, PU5, G5, PПС). Так как структурная группа 4-5 освобождена от связей (звеньев 2 и 0), то действие этих связей заменяется силами реакций R2-4 и R0-5 соответственно. Силу реакции R2-4 раскладывают на две составляющие – нормальную (параллельную BD) и тангенциальную (перпендикулярно BD):
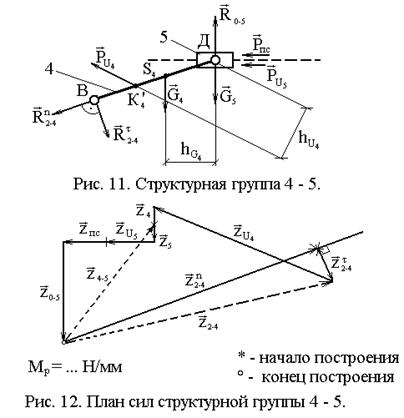 |
R 2-4 = R n2-4 + R t2-4.
Таким образом определяются лишь линии сил реакций, направление же их пока неизвестно. Поэтому на плане направление стрелок сил реакций принимают произвольно. Линия вектора силы реакции R 0-5 будет направлена перпендикулярно движению ползуна 5. (Если же учитывать трение между ползуном 5 и направляющей 0, то реакция будет отклонена на угол трения j = arctg(f) = arctg(FТР/R0-5) в сторону, противоположную движению ползуна 5; здесь f – коэффициент трения скольжения, FТР – сила трения). Направление же реакции пока неизвестно. На чертеже ее вектор пока направляем произвольно.
Определяется реакция R t2-4 из условия равенства нулю суммы моментов всех сил, приложенных к звену 4, относительно оси D:
åMD(Pi) = 0
или
PU4 . hU4 - G4 . hG4 - Rt2-4 . BD = 0,
отсюда
Rt2-4 = (PU4 . hU4 - G4 . hG4)/BD.
В этих выражениях hU4, hG4 – плечи сил относительно оси D, берутся в мм из плана структурной группы. Если в результате вычисления величина Rt2-4 получена со знаком минус, то предварительно выбранное направление этой реакции следует поменять на противоположное.
Далее следует определить величины и направления сил реакций Rn2-4 и R0-5. Для этого можно использовать метод планов сил. Составляется векторное уравнение равновесия структурной группы (так называемое уравнение кинетостатики):
R n2-4 + R t2-4 + P U4 + G 4 + G 5 + P U5 + P ПС + R 0-5= 0. (1)
Рекомендация: при составлении уравнения следует ставить одну неизвестную силу в начале уравнения, вторую неизвестную – в конце; силы, относящиеся к одному и тому же звену, записывать последовательно друг за другом.
Неизвестные силы R n2-4 и R 0-5 находят путем графического построения векторного уравнения (1), т.е. построением плана сил структурной группы 4 - 5. План сил будет иметь вид замкнутого векторного многоугольника (рис.12), так как сумма всех сил равна нулю. Масштаб, в котором строится план сил, выбирается произвольным и определяется как отношение величины какой-либо известной силы к длине вектора (мм), изображающего эту силу на плане. Например, масштаб плана сил определяется по формуле
Мр = Rt2-4/ Z t2-4,
где Z t2-4 – длина вектора, мм, изображающего на плане сил вектор R t2-4.
Эта длина берется произвольной величины. При ее выборе следует учитывать два условия: чтобы план сил, изображенный в этом масштабе, смог разместиться на отведенном месте чертежа и чтобы величина масштаба Мр была удобна для использования в дальнейших расчетах (была бы круглым числом).
Затем вычисляются длины векторов, изображающих на плане сил остальные известные силы, входящие в уравнение (1):
ZU4 = RU4/Мр, мм; Z4 = G4/Мр, мм; Z5 = G5/Мр, мм и т.д.
Тогда уравнение (1) можно заменить таким уравнением:
Z n2-4 + Z t2-4 + Z U4 + Z 4 + Z 5 + Z U5 + Z ПС + Z 0-5= 0. (2)
После этого приступают к построению плана сил – строят векторный многоугольник в той последовательности, в которой записано векторное уравнение (2), а именно: сначала проводят линию, параллельную BD; из произвольно выбранной точки, принадлежащей этой прямой (она обозначена знаком *), проводят вектор Zt2-4 с длиной Zt2-4, затем вектор ZU4 и т.д. Заканчивают построение проведением из конца вектора ZПС линии, параллельной вектору R0-5, до пересечения с линией, параллельной BD (конец построения обозначен знаком о).
Направления векторов Z0-5 и Zn2-4 определяются по принципу замыкания векторного многоугольника.
Вычисляются искомые силы реакций:
R0-5 = Z0-5 . Мр, Н;
Rn2-4 = Zn2-4 . Мр, Н,
где Z0-5 и Zn2-4 - длины векторов, мм, которые измеряются на плане сил. Направления векторов этих сил совпадают с направлением векторов Z0-5 и Zn2-4 на плане сил.
Полная реакция в кинематической паре В равна векторной сумме нормальной и тангенциальной составляющих:
R 2-4 = R n2-4 + R t2-4,
причем она параллельна вектору Z2-4 на плане сил, а ее величина вычисляется по формуле
R2-4 = Z2-4 . Мр.
Далее определяется сила реакции R4-5 между шатуном 4 и ползуном 5. Для этого можно составить уравнение равновесия или шатуна, или ползуна. Например, уравнение равновесия ползуна в векторной форме будет записано так:
G 5 + P U5 + P ПС + R 0-5 + R 4-5 = 0. (3)
Решая уравнение (3) графически (т.е. построив план сил ползуна в масштабе Мр), определяют величину реакции R4-5. Для этого можно использовать ранее построенный план сил структурной группы, где все первые четыре известные силы (см. векторное уравнение (3)) уже изображены. Проведя на плане сил вектор Z4-5 и измерив его длину, вычисляют искомую силу реакции
R4-5 = Z4-5 . Мр, Н.
Направление ее совпадает с направлением вектора Z4-5 на плане сил.
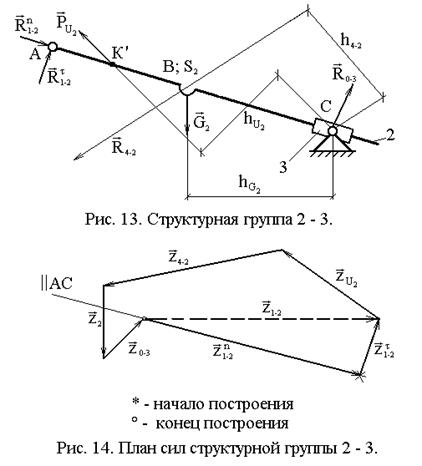
2.3.1.2. Силовой анализ структурной группы 2 класса 3 вида
Последовательность проведения силового анализа аналогична силовому анализу предыдущей структурной группы.
Структурная группа 2 класса 3 вида, состоящая из кулисы 2 и камня 3, изображается на чертеже в масштабе ML в заданном положении (рис.13).
На чертеж структурной группы наносятся все известные внешние силы (в рассматриваемом примере это G2, PU2 и сила реакции R4-2 = - R2-4). Действие отброшенных связей (звеньев 0, 1 и 4) заменяют силами реакций: R0-3, R4-2, R1-2. Причем вектор силы R0-3 направлен перпендикулярно АС (так как трение между звеньями 2 и 3 в данном примере не учитывается), R4-2 = - R2-4 (величину и направление R2-4 берут из силового анализа предыдущей структурной группы). Силу реакции R1-2 раскладывают на две составляющие – нормальную Rn1-2 (параллельную прямой АС на плане структурной группы) и тангенциальную Rt1-2 (перпендикулярную АС), т.е.
R1-2 = Rn1-2 + Rt1-2.
 |
Вычисляется величина Rt1-2 из условия равенства нулю суммы моментов всех сил, действующих на структурную группу, относительно оси С:
åМрi(C) = 0
или
- R t1-2 . AC + G 2 . hG2 + R 4-2 . h4-2 - P U2 . hU2 = 0,
откуда вычисляется величина Rt1-2. Здесь величины плеч сил АС, hG2, h4-2, hU2 берутся в мм из плана структурной группы. Если в результате вычисления величина Rt1-2 получилась со знаком минус, то предварительно выбранное ее направление следует поменять на противоположное.
Затем составляется векторное уравнение равновесия структурной группы 2 - 3 (уравнение кинетостатики):
R n1-2+ R t1-2 + P U2 + R 4-2 + G 2 + R 0-3= 0. (4)
Выбирается масштаб плана сил структурной группы 2 - 3:
MР = Rt1-2/Zt1-2, м/мм.
Все известные силы переводятся в векторные отрезки:
ZU2 = PU2/MР, мм; Z4-2 = R4-2/Zt1-2, мм.
Тогда уравнение (4) можно записать в таком виде:
Z n1-2+ Z t1-2 + Z U2 + Z 2 + Z 0-3= 0. (5)
Неизвестные векторы Zn1-2 и Z0-3 находятся графически – построением планов сил в масштабе MР (рис.14). План сил строится в последовательности написания векторного уравнения (5). Направления векторов Z0-3 и Zn1-2 определяются по принципу замыкания векторного многоугольника.
Вычисляются искомые силы реакции:
R0-3 = Z0-3 . MР, Н;
Rn1-2 = Zn1-2 . MР,Н,
где Z0-3 и Zn1-2 - длины векторов в мм, которые берутся из плана сил. Полная реакция в кинематической паре А равна сумме нормальной и тангенциальной составляющих сил реакций:
R 1-2 = R n1-2 + R t1-2.
Ее величина вычисляется по формуле
R1-2 = Z1-2 . MР, Н,
а направление совпадает с вектором Z1-2 на плане сил.
Сила реакции между кулисой 2 и камнем 3:
R2-3 = R0-3.
2.3.1.3. Силовой анализ ведущего звена
Если ведущее звено - кривошип, то его силовой анализ можно проводить в следующей последовательности (методом планов сил).
Кривошип изображается в масштабе МL в заданном положении (рис.15).
На него наносятся уравновешивающая сила РУР, сила веса звена G1, силы реакций в кинематической паре А R2-1 и кинематической паре 0 R0-1. ПричемРУР перпендикулярна ОА, G1 направлена вертикально, R2-1 = - R1-2
 |
(см. силовой анализ структурной группы 2-3). Направление и величина силы R0-1 пока неизвестны.
Затем определяется уравновешивающая сила P УР из условия равенства нулю суммы моментов всех сил относительно оси 0:
å МО (Рi) = 0
или
R2-1 . h2-1 - Р УР.OA = 0,
откуда
Р УР = R2-1 . h2-1/OA, Н.
Здесь длина плеча h2-1 берется в мм из плана ведущего звена.
Зная величину РУР, можно определить мощность, требуемую для приведения в движение механизма:
N = РУР . VA, Вт.
Далее определяется сила реакции между кривошипом и стойкой R0-1. Для этого можно использовать метод планов сил. Составляется уравнение равновесия ведущего звена:
R 2-1 + G 1 + Р УР + R 0-1 = 0.
Выбирается масштаб плана сил
MР = R2-1/Z2-1.
Остальные известные силы переводятся в векторные отрезки:
ZУР = Р УР/MР, мм;
Z1 = G1/MР, мм.
Записывается векторное уравнение равновесия ведущего звена в виде векторных отрезков:
Z 2-1 + Z 1 + Z УР + Z 0-1 = 0.
Строится план сил, соответствующий этому уравнению (рис.16).
Величина силы реакции R0-1 вычисляется по формуле:
R0-1 = Z0-1 . MР, Н,
где Z0-1 берется, в мм, из плана сил.
Если ведущее звено – муфта скольжения, то его силовой анализ можно проводить в той же последовательности.
 |
Но при этом следует иметь в виду, что вместо уравновешивающей силы на звено действует уравновешивающий момент М УР, величина которого может быть вычислена по формуле:
М УР = R2-1 . h2-1 . ML, Нм.
Здесь длина плеча h2-1, в мм, берется из плана ведущего звена, вычерченного в масштабе ML, м/мм. Сила реакции R2-1 = - R1-2, где R1-2 берется из силового анализа структурной группы 2 - 3.
Затем определяется реакция R0-1 методом планов сил. Уравнение равновесия звена 1 – кривошипа можно записать в следующем виде:
R 2-1 + G 1 + R 0-1 = 0.
Если выбран масштаб плана сил MР, то уравнение равновесия звена запишется в виде
Z 2-1 + Z 1 + Z 0-1 = 0.
Строится план сил ведущего звена с использованием этого уравнения (рис.18). Величина силы реакции R0-1 вычисляется по формуле:
R0-1 = Z0-1 . MР, Н.
Направление этой реакции совпадает с направлением вектора Z0-1 на плане сил ведущего звена.
2.4. Определение уравновешивающей силы РУР
при помощи "жесткого рычага" Н.Е. Жуковского (рис.9)
Строится повернутый на 90° (безразлично, в какую сторону) план скоростей механизма. В точки этого плана R2, b, R4, S4 и d, соответствующие точкам приложения внешних сил на плане механизма, переносятся внешние силы PU2, G2, PU4, G4, G5, PПС. Точки R2, R4 и S4 определяются по теореме подобия.
Исходя из теоремы о "жестком рычаге" Н.В, Жуковского (гласящей, что сумма моментов всех сил, приложенных к повернутому плану скоростей, равна нулю) составляется уравнение моментов сил относительно полюса PV повернутого плана скоростей:
- PU2 . hU2' - G2 . h2' - PU4 . h4' - PU5 . (PVd) - PПС . (PVd) + PУР. (PVa) = 0.
Из этого уравнения определяется величина уравновешивающей силы PУР٭. Если PУР٭ получается со знаком минус, то ее предварительно выбранное на повернутом плане скоростей направление следует изменить на противоположное.
Для оценки точности проведенных расчетов целесообразно определить ошибку в определении Р УР методом планов сил и методом Н.Е. Жуковского по формуле

Величина ошибки не должна превышать 5 %.