Лист 1. КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ
Известны (заданы):
1. Кинематическая схема шестизвенного рычажного механизма
2. Длины звеньев LОА, LАB, LBD, координаты неподвижных точек ХС, YC, YD, и углы направляющих (если они содержатся в задании).
3. Частота вращения вала двигателя nДВ, об/мин.
Требуется:
1. Графическим методом определить законы перемещений, скоростей и ускорений выходного звена.
2. Построить планы скоростей для 12 положений механизма.
3. Построить планы ускорений для позиции механизма, в которой сила полезных сопротивлений РПС, развиваемая выходным звеном, имеет максимальное значение (см. график РПС в задании [1]).
ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ
1.1.Определение законов перемещений, скоростей и ускорений выходного звена графическим методом
Последовательность решения рассмотрим на примере механизма, изображенного на рис. 1.
Строятся несколько (желательно 8 или 12) совмещенных планов механизма в произвольно выбранном масштабе длин:
МL = LОА/ОА, мм,
где: LОА – заданная длина кривошипа в метрах,
ОА – длина отрезка, мм, изображающего кривошип на плане механизма.
Величина ОА берется произвольно в пределах 20…50 мм. При этом следует учитывать, чтобы, во-первых, масштаб МL был удобен для расчетов (желательно круглое число), во-вторых, чтобы план механизма разместился на отведенном для него месте чертежа.
Все линейные размеры других звеньев и координаты неподвижных точек переводятся этим масштабом в отрезки:
хС = ХС/МL; yD = YD/МL; yС = YC/МL; BD = LBD/ML, мм.
Построение совмещенного плана механизма начинается с построения траектории движения точки А кривошипа. Для этого проводится окружность радиусом ОА с центром О, которая делится на 8 или 12 равных частей. Наносятся координаты неподвижных точек С и YD.
Затем методом засечек строятся положения подвижных точек (в нашем примере – точек В и D).

Строится график перемещения выходного звена – точки D в координатных осях перемещения SD и времени t (рис. 2).
Для удобства желательно масштаб перемещения Мs принять равным масштабу длины: MS = ML.
На оси t откладываются в мм 12 равных отрезков; рекомендуется принять LX = 180 мм, этот отрезок будет изображать время одного оборота кривошипа в масштабе:
Mt = T/LX,
где Т - время (период) одного оборота.
Величина периода Т вычисляется по формуле
Т = 2.p/W1, с,
а угловая скорость вращения кривошипа – по формуле
W1 = p. nДВ/(30 . U1-H),
где nДВ - заданная частота вращения вала двигателя, об/мин;
U1-H – заданное передаточное отношение зубчатого механизма.
Окончательная формула расчета масштаба времени:
Mt = (60. U1-H)/(LX . nДВ), c/мм.
Приняв положение 1 кривошипа, соответствующее крайнему левому положению ползуна (точки Д), из точек 2,3 и т.д., расположенных на оси t, откладывают ординаты, равные величине перемещения ползуна от крайнего левого положения, взятые с совмещенного плана механизма. Полученные точки обводят плавной кривой. Отрезок HД – это максимальный ход ползуна – точки Д.
Строится график скорости точки Д (рис.3) путем графического дифференцирования графика SD (так как VD = dSD/dt). Оси абсцисс (времени t) на этих графиках одинаковы. Вычисляется масштаб графика скорости:
MV = MS/(Mt . hv), м/с/мм,
где hV – полюсное расстояние для дифференцирования (выбирается произвольной величины в пределах 20…40 мм, при этом следует учесть, что с увеличением hV возрастает размер графика скорости по оси ординат).
При графическом дифференцировании методом хорд из полюса РV проводят лучи, параллельные хордам графика SD, до пересечения с осью VD. Полученные точки пересечения сносят на середины соответствующих участков и соединяют их плавной кривой.
Строится график ускорения точки Д (рис.4) путем графического дифференцирования графика VD.Масштаб графика ускорений вычисляется по формуле:
MA= MV/(Mt . ha), м/с2/мм,
где ha = 20...40 мм - полюсное расстояние для дифференцирования, выбирается произвольно.
Дифференцирование можно проводить методом хорд или методом касательных. Для повышения точности построений желательно использовать оба метода.
1.2. Построение планов скоростей механизма
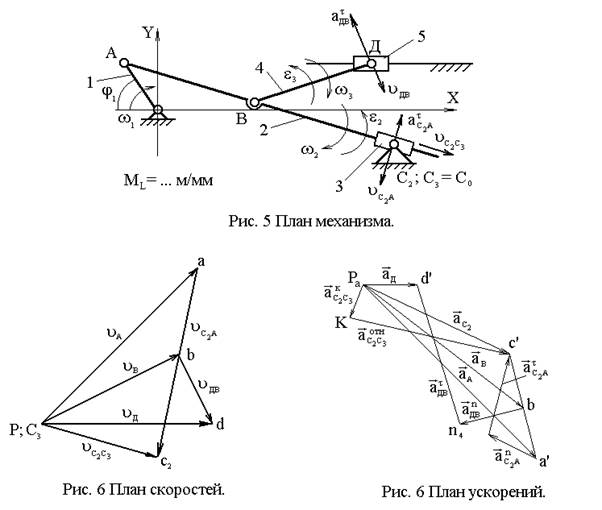
Рассмотрим пример для одного положения механизма. Для этого строим план механизма в заданном положении и в выбранном масштабе длин МL (рис.5).
Вычисляется скорость точки А кривошипа:
VA = W1 . LOA,м/с.
Вектор скорости VA направлен перпендикулярно прямой ОА (кривошипа) в сторону вращения кривошипа.
Скорость VC2 точки С звена 2 определяется графическим построением следующих векторных уравнений (т.е. построением планов скоростей):
V C2 = V A + V C2A;
V C2 = V C3 + V C2C3.
Здесь вектор скорости V C2A направлен перпендикулярно прямой AC2, но пока неизвестна величина этой скорости; скорость V C3 = 0; вектор скорости V C2C3 направлен параллельно прямой AC2, но величина этой скорости также пока неизвестна.
Для определения неизвестных величин скоростей строим план скоростей в следующей последовательности. Из произвольно выбранной точки – так называемого полюса РV – перпендикулярно ОА проводится отрезок РVa произвольной длины (рис.6). Тогда масштаб плана скоростей вычисляется по формуле
MV = VA/РVa, м/с/мм,
где РVa - длина отрезка, мм, изображающая на плане скоростей вектор скорости VA.
Из точки a перпендикулярно прямой АС2 проводится луч. Через полюс РV проводится второй луч параллельно прямой АС2. В месте их пересечения получаем точку с2. Вектор РVс2 изображает скорость V C2, а вектор ас2 – скорость V C2A. Вычисляются величины скоростей по формулам
V C2 = (РVс2) . M V;
V C2A = (ас2) . M V, м/с.
Здесь длины отрезков РVс2 и ас2 взяты из плана скоростей. Вычисляем угловую скорость кулисы 2:
W2 = VC2A/LAC2, 1/с.
Здесь LAC2 = (AC2) . ML, м, а величина АС2 в мм берется из плана механизма.
Определяется скорость точки В, принадлежащей кулисе 2. Для этого используется теорема подобия: Отрезки относительных скоростей на плане скоростей образуют фигуру, подобную соответствующей фигуре на плане механизма.
В соответствии с ней составляется уравнение пропорции
АС2/ас2 = AB/ab.
Здесь длины отрезков АС2 и АВ берутся в мм из плана механизма, а длина отрезка ас2 – из плана скоростей. Вычисляется длина отрезка ab и откладывается на отрезке ас2 плана скоростей. Полученный вектор (Рvb) изображает на плане скоростей скорость V B точки В, причем величина скорости точки В вычисляется по формуле
V B = (Рvb) . M V, м/с.
Определяется скорость точки Д. Для этого составляется векторное уравнение скорости звена 4:
V D = V B + V DB.
Здесь скорость V B уже известна как по величине, так и по направлению, а V DB^BD и вектор V D параллелен движению ползуна 5. Для нахождения величин V DB и V D строится план скоростей звена 4 в следующей последовательности. Через точку b плана скоростей проводится линия, перпендикулярная прямой ВD плана механизма, а через полюс РV – прямая, параллельная движению ползуна 5. В месте их пересечения получается точка d. Вычисляются значения скоростей:
VDB = (bd) . MV,
VD = (РVd) . MV, м/с.
Направления векторов скоростей устанавливаются в соответствии с векторным уравнением скоростей.
Далее вычисляется угловая скорость шатуна:
W4 = VDB/LBD, 1/с.
Направления угловых скоростей звеньев W 2 и W 4 показываются на плане механизма. Планы скоростей строятся для всех 12 позиций. С их использованием вычисляются линейные скорости всех характерных точек механизма (центров кинематических пар, центров масс звеньев и т.д.), угловые скорости звеньев. Результаты расчетов удобно свести в таблицу. Вычисленные скорости нужны в дальнейшем для проведения динамического анализа механизма и расчета маховика (см. лист 4 курсового проекта).
1.3. Построение плана ускорений механизма
Сначала строится план механизма в выбранном масштабе длин ML и в той позиции, в которой сила полезных сопротивлений РПС, приложенная к ползуну 5, максимальна. Это желательно сделать по следующим причинам: знание величин ускорений звеньев необходимо для расчета сил инерции и моментов сил инерции, а при проведении силового анализа механизма целесообразно рассматривать именно то положение механизма, которое нагружено максимальной силой РПС. Для того чтобы его определить, необходимо на прямой HD хода ползуна (смотри совмещенные планы механизма) построить график изменения силы PПС и определить искомую позицию механизма.
Ускорение точки А кривошипа определяется с использованием векторного уравнения ускорения точки А кривошипа относительно оси вращения О:
а А = а АО = а nАО + а tАО,
где а nАО – нормальная составляющая ускорения точки А относительно О;
а t АО - тангенциальная составляющая ускорения А относительно О.
Так как по условий задачи угловая скорость кривошипа постоянна (W1 = const), то угловое ускорение e1 = 0, а тангенциальная составляющая ускорения также равна нулю:
аtАО = e1 . LOA = 0.
Тогда полное ускорение точки А равно нормальной составляющей ускорения: аА = аnАО, причем
аnАО = w21 . LOA, м/с2.
Вектор ускорения аnАО параллелен ОА и направлен от А к 0.
Затем определяется ускорение точки С2, принадлежащей кулисе 2.
Для этого составляются следующие векторные уравнения ускорений:
а) для звена 2 (кулисы)
a C2 = а А + a nC2А + a tC2A;
б) для звена 3 (качающегося камня):
a C2 = a C3 + a kC2C3 + aОТНC2C3.
Рассчитываются величины ускорений, входящих в эти векторные уравнения:
нормальное ` a nC2А = V 2C2A/ L AC2 , м/с2;
Кориолисово a kC2С3 = 2 V C2C3 . w 2, м/c2.
Причем`вектор нормального ускорения a nC2А параллелен АС2 и направлен от С2 к A.
Для определения направления вектора Кориолисова ускорения a kC2C3 нужно вектор С2С3 относительной скорости V C2C3 повернуть на 90° по направлению угловой скорости w2 кулисы. Вектор тангенциальной составляющей ускорения a tC2A перпендикулярен АС2, а вектор относительного (релятивного) ускорения a ОТНC2C3 параллелен АС2. Причем здесь имеется в виду, что нормальное ускорение a nC2С3 = 0, если звено АС2 – прямая линия.
Неизвестные величины a tC2A и a ОТНC2C3 находятся построением плана ускорений (рис.7). Для этого сначала выбирается масштаб плана ускорений:
М а = a А/(Раа ΄), м/с2/мм,
где (Раа ΄) - длина вектора в мм, изображающего ускорение аА на плане ускорений.
Величина (Раа ΄) выбирается произвольно из расчета, чтобы масштаб был удобен для расчетов (желательно круглое число), а план ускорений разместился на отведенном месте чертежа. Построение плана ускорений осуществляется в соответствии с последовательностью написания вышеприведенных векторных уравнений.
Сначала строится (т.е. изображается графически) первое векторное уравнение, для чего из произвольно выбранного полюса РА (рис.7) параллельно отрезку ОА (см. план механизма) проводится вектор Раа с ранее выбранной длиной (см. расчет масштаба М а). Он изображает ускорение а А = а nАО. Из точки a ΄ параллельно АС2 проводится вектор (а΄n 2), изображающий вектор a nC2A. Длина вектора (a ΄ n 2) вычисляется по формуле:
a ' n 2 = a nC2A/ М а, мм.
Через точку n2 проводится луч по направлению ускорения a tC2A перпендикулярно АС2.
Затем строится второе векторное уравнение. Из полюса Ра проводится вектор (Раk) длиной Раk = a kC2C3/ М а, мм, изoбражающий Кориолисово ускорение a kC2C3. Из точки К проводится луч по направлению ускорения a ОТНC2C3, параллельный АС2.
В месте пересечения лучей получается точка С2', которую соединяют c полюсом Ра и точкой а΄. Вектор n2c2΄ изображает ускорение a tC2A, вектор (kC2΄) – ускорение a ОТНC2C3,а вектор(a'c'2) – полное ускорение a C2A.
Для определения ускорения точки В используется теорема подобия: отрезки относительных ускорений на плане ускорений образуют фигуру, подобную соответствующей фигуре на плане механизма.
В соответствии с ней составляется уравнение пропорции отрезков на плане механизма и плане ускорений:
(а'2c'2/АС2) = (а'b'/AB),
откуда вычисляют длину отрезка
(а'b') = (а2'c2' . АВ)/АС2, мм
и откладывают этот отрезок от точки а' в сторону точки с'2 на плане ускорений. Соединив полюс Ра с точкой b', получают полное ускорение точки В aB, причем
a B = (Ра b') . М а, м/с2.
Определяют ускорение точки Д. Для этого составляется векторное уравнение ускорений шатуна 4
а D = a B + a nDB + a tDB.
Вычисляется величина нормального ускорения:
a nDB = V 2DB/ L BD, м/с2.
Из точки b΄ параллельно звену ВД откладывается вектор (b΄n4) длиной b΄n4 = a nDB/МА, мм, изображающий на плане ускорение a nDB. Через точку n4 проводится луч, перпендикулярный ДВ, до пересечения с проведенной из полюса Ра прямой, параллельной движению ползуна 5. В месте пересечения получается точка d'. Вектор (Раd ') изображает полное ускорение точки Д – ad, а вектор (n4b') - тангенциальное ускорение a tDB. Вычисляется величина этого ускорения
a tDB = (n4d ΄).
Вычисляются величины угловых ускорений звеньев 2 (кулисы) и 4 (шатуна):
e 2 = a tC2A/ L AC2,1/с2;
e 4 = a tDB/ L BD, 1/с2.
Направления угловых ускорений определяются по тому, куда "вращают" векторы a tC2A и a tDB звенья 2 и 4, если их перенести соответственно в точки С2 и Д плана механизма.
Для определения радиуса кривизны траектории движения точки В, совершающей сложное движение, используется формула
r = V2B/anB, м,
где VB=(РVb) . MV, м/с - скорость точки В.
Для ее нахождения необходимо полное ускорение точки В разложить на нормальную и тангенциальную составляющие:
a В = a nB + a tB.
Это можно сделать графически на построенном плане ускорений, причем нормальная составляющая ускорения точки В a nB будет направлена перпендикулярно скорости VB, а тангенциальная – a tB – параллельно скорости VB.