Тема. Изучение электрических аппаратов низковольтных цепей карьерных электровозов.
Контроллеры машиниста.
Контроллеры машиниста (управления) предназначены для дистанционного управления силовыми высоковольтными аппаратами. С их помощью к источнику низкого напряжения подключают или отключают в определенной последовательности провода цепи управления, т. е. включают или выключают высоковольтные аппараты при пуске, регулировании скорости, остановке, изменении направления движения и электрическом торможении электровоза.
Таким образом, контроллеры машиниста служат для косвенного управления работой тяговых двигателей в тяговом и тормозном режимах.
Для выполнения этих функций контроллеры снабжаются рядом рукояток, каждая из которых предназначена для выполнения определенных операций управления. Рукоятки имеют несколько фиксированных позиций, соответствующих определенным положениям силовых аппаратов или определенным операциям их переключения, а при автоматическом управлении – определенным режимам переключений.
В системах плавного регулирования в контроллеры встраиваются элементы непрерывного регулирования – регулируемые резисторы или различные индукционные устройства. В этом случае рукоятка может даже не иметь отдельных позиций, но должна фиксироваться в любом положении.
Распределение функций управления и расположение отдельных рукояток контроллера выполняют с учетом обеспечения наибольшей простоты и удобства пользования ими. Для предотвращения ошибочных действий машиниста в контроллере с помощью механических блокировок создают взаимозависимость между рукоятками. Одну из рукояток контроллера, обычно реверсивную, выполняют съемной. Она служит ключом, запирающим остальные рукоятки в выключенном положении: снять реверсивную рукоятку можно только в нулевом положении; в это положение она может быть поставлена только после возвращения остальных рукояток также в нулевое положение. На электровозе обычно имеется два контроллера, а реверсивную рукоятку выдают всегда одну. Поэтому машинист не может случайно оставить какую-либо рукоять на одном из контроллеров во включенном положении, что вызвало бы нарушение правильной работы схемы при управлении составом с помощью другого контроллера. Контроллеры машиниста бывают барабанного и кулачкового типов. Принцип работы их поясняется рис. 4.1.

Рис. 4.1. Схемы контроллеров машиниста барабанного (а) и кулачкового (б) типов
В контроллере барабанного типа (рис. 4.1, а) на вал 9 насажен барабан 1, к которому прикреплены сегменты 2. От угла сегмента и его местоположения на барабане при повороте последнего машинистом зависит необходимая последовательность замыкания и размыкания проводов цепи управления, которые присоединяются к соответствующим пальцам 3, закрепленным на стойке 4. Пальцы прижаты к барабану, и контакт между ними осуществляется с помощью сегментов при повороте барабана на определенный угол.
В контроллере кулачкового типа (рис. 4.1, б) замыкание и размыкание проводов цепей управления осуществляется кулачковыми контакторными элементами, укрепленными на стойке 4. Посредством рукоятки машинист поворачивает вал 9, на котором укреплены кулачковые шайбы 8, имеющие выступы 10 различных конфигураций и размеров. Выступ нажимает на ролик 11 контакторного элемента, при этом контакты 5 и 6, к которым присоединяются провода цепи управления, размыкают цепь. Как только выступ шайбы пройдет ролик, сжатая до этого пружина 12 повернет рычаг 7, и контакты 5 и 6 снова замкнутся. Таким образом, контакты контакторов размыкаются кулачковыми шайбами, а замыкаются под действием пружин.
Сопоставление контроллеров обоих типов позволяет отметить, что барабанный контроллер значительно проще по конструкции, дешевле в производстве и ремонте, чем кулачковый. Однако скольжение его пальцев по поверхности сегментов приводит к интенсивному износу контактных поверхностей из-за трения. Износ возрастает с увеличением длины пути скольжения пальцев, а также при дугообразовании на контактах. Контроллер кулачкового типа лишен этих недостатков. На всех отечественных карьерных электровозах и тяговых агрегатах устанавливаются контроллеры кулачкового типа.
Устройство контроллера кулачкового типа, используемого для управления электровозом постоянного тока со ступенчатым резисторным пуском и электрическим торможением тяговых двигателей рассмотрен на рис. 4.2.
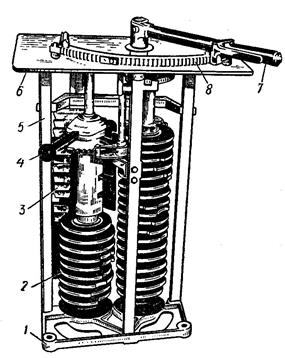
Рис. 4.2. Контроллер со ступенчатым резисторным пуском.
Контроллер собран на литом основании 1, которое соединено с крышкой 6 стальными рейками 5. Кулачковые контакторы 3 укреплены на рейках 5. Контроллер имеет два переключателя: главный и реверсивно-тормозной.
Главный переключатель состоит из двух кулачковых валов, связанных между собой зубчатой передачей. Главный вал включает в себя стальную ось, на которую насажены кулачковые шайбы 2, приводящие в действие 28 контакторов 3. Управляя в процессе движения этим переключателем с помощью несъемной главной рукоятки 7, машинист воздействует на контакторы силовой цепи. На рукоятке 7 имеется защелка; при установке ее во впадины сектора 8 происходит фиксация позиций. Всего фиксированных позиций 37, причем 24 -я и 36 -я позиции являются безреостатными. На позицию последовательно-параллельного соединения тяговых двигателей рукоятку 7 можно установить только при воздействии на деблокирующее устройство, смонтированное на рукоятке нажав кнопку.
Силовыми реверсивными и тормозными переключателями машинист управляет посредством реверсивно-тормозного переключателя контроллера, приводимого в действие съемной реверсивной рукояткой 4. Реверсивный вал состоит из чугунного корпуса, выполненного соосно с главным валом, кулачковых шайб, закрепленных на корпусе и управляющих десятью кулачковыми контакторами. Оси реверсивного и главного валов вращаются в шариковых подшипниках.
Взаимозависимость (блокировка) главной и реверсивной рукояток выполнена так, что повернуть главную рукоятку на любую фиксированную позицию можно только тогда, когда реверсивная рукоятка не находится на нулевой позиции; поворот реверсивной рукоятки на любую позицию возможен только при нахождении главной рукоятки на нулевой позиции.
Для управления тяговыми агрегатами переменного тока с дизельными секциями автономного питания при плавном регулировании напряжения на тяговых двигателях используют контроллеры, показанные на рис. 4.3.
Контроллер (кулачкового типа) состоит из двух переключателей – главного и реверсивно-тормозного, валы которых закреплены в шариковых подшипниках на нижнем и верхнем 5 основаниях. Сверху контроллер закрыт крышкой 1.
Главный переключатель служит для регулирования угла отпирания тиристоров и дистанционного управления главным контроллером в тяговом и тормозном режимах, а также для управления дизельной секцией. Положение главного переключателя, на вал которого насажен штурвал управления 2, фиксируется на позициях, нанесенных на лимбе 3. Кроме фиксированных позиций, имеется восемь нефиксированных, используемых при работе в режиме автономного питания.

Рис. 4.3. Контроллер управления тяговыми агрегатами переменного тока с дизельными секциями автономного питания
Для регулирования угла отпирания тиристоров управляющими напряжением используется индукционное устройство — сельсин 8. Однофазный сельсин представляет собой асинхронную машину, в которой расположенная на роторе обмотка возбуждения создает пульсирующий магнитный поток. Обмотка статора сельсина имеет три фазы, соединенных в звезду. В данном случае для работы используются только две фазы. Пульсирующий магнитный поток индуктирует в обмотке статора ЭДС, зависящую от угла поворота ротора. При повороте ротора взаимоиндуктивность между обмотками ротора и статора плавно изменяется по закону косинуса, вследствие чего индуктируемая в обмотке статора э. д. с. пропорциональна косинусу угла поворота.
На оси главного переключателя установлена профильная шайба 6, соединенная через поводок 7 с ротором сельсина. Обмотка возбуждения сельсина подключена к блоку питания напряжением 110 В при частоте 50 Гц, а управляющее напряжение изменяется в пределах 1...30В в зависимости от угла поворота ротора.
Управление реверсивно-тормозным переключателем производится посредством съемной реверсивной рукоятки 4, имеющей пять фиксированных позиций.
Фиксация валов обоих переключателей на позициях осуществляется профильными дисками и системой рычагов с пружинами. Для предотвращения ошибочных действий машиниста оба вала сблокированы между собой так, что главный переключатель может быть установлен в любое положение, если реверсивная рукоятка не находится на нулевой позиции; установка реверсивно-тормозного переключателя в нулевое положение возможна лишь при нахождении главного переключателя на нулевой позиции.
Выключатели.
Многочисленные низковольтные выключатели применяются для управления различными цепями из кабины машиниста или машинных отделений электровозов. С их помощью осуществляются подъем и опускание центральных и повороты боковых токоприемников; включение и выключение вспомогательных машин, печей отопления, освещения и т. п.
Все аппараты низковольтных цепей имеют ручное управление, а их контактная система, как правило, состоит из пальцев или стыковых контактов.
Типичным примером таких выключателей являются блоки КУ, располагаемые на пульте управления машиниста. Устройство контактной системы данного выключателя показано на рис. 4.4.

Рис. 4.4. Устройство контактной системы выключателя КУ: 1 – подвижный контакт; 2 – неподвижный контакт; 3 – пружина; 4 – ось; 5 – рукоятка.
Аналогична конструкция выключателя управления, с помощью которого подключаются к источнику энергии и отключаются от него все цепи управления. Однако этот выключатель оборудуется небольшим дугогасительным устройством.
В цепях освещения используются пакетные выключатели типа ПВ, контактную систему которых набирают из отдельных пакетов. Выключатели снабжаются заводными пружинами для мгновенного переключения, при этом скорость движения их подвижных контактов от скорости вращения машинистом рукоятки выключателя не зависит.
Регуляторы напряжения.
Регуляторы напряжения устанавливаются на электровозах постоянного тока и предназначены для автоматического регулирования напряжения генераторов управления. Регулятор напряжения автоматически изменяет силу тока возбуждения генератора, поддерживая его напряжение постоянным при изменении частоты вращения и нагрузки. Пределы изменения тока возбуждения зависят от заданных колебаний напряжения контактной сети, характеристик приводного двигателя и самого генератора.
Современные тяговые агрегаты оборудуются транзисторными бесконтактными регуляторами напряжения (БРН), имеющими высокую эксплуатационную надежность и практически не нуждающимися в подрегулировке. Конструктивно БРН монтируется на изоляционных панелях, закрываемых с лицевой стороны защитными кожухами.
Точность регулирования при напряжении контактной сети 2300... 3850 В и нагрузке генератора до 200 А составляет 50 ± 1,5 В. Схема регулятора и его подключение к цепи управления показаны на рис. 4.5. БРН имеет четыре вывода: к первому через предохранитель Пр11 присоединяется положительная клемма Я1 генератора управления, ко второму и третьему – обмотка возбуждения, четвертый соединяется с землей. Параллельно генератору управления на сборную шину подключается аккумуляторная батарея АБ. Диод Д31 играет роль реле обратного тока, а контактор Р5, выполняя защитную функцию, размыкается в случае резкого повышения напряжения на генераторе, и тогда сборная шина получает питание только от аккумуляторной батареи.

Рис. 4.5. Схема регулятора напряжения и его подключение к цепи управления.
Схема БРН состоит из двух основных частей: измерительной (левее клеммы 1) и регулирующей (правее этой клеммы). Последняя представляет собой мультивибратор.
Чувствительным элементом измерительной части, реагирующим на изменение напряжения генератора управления, является стабилитрон Д13. После запуска генератора управления его напряжение возрастает пропорционально частоте вращения якоря. При номинальной частоте вращения напряжение становится равным 50 В. В это время стабилитрон Д13 пробивается и его сопротивление резко падает. Транзистор Т1 отпирается, обеспечивая режим насыщения транзистора Т2; последний шунтирует управляющий электрод тиристора Д11. Известно, что для запирания тиристора, кроме снятия управляющего импульса, необходимо приложить обратное напряжение. Это действие по отношению к тиристору Д11 выполняет схема мультивибратора: в момент отпирания гасящего тиристора Д12, через который напряжение конденсатора С1, как обратное, прикладывается к тиристору Д11, последний запирается, прерывая ток возбуждения, протекавший до этого через обмотку Ш1-Ш2, клемму 2 и диод Д7 на землю. Схема начинает работать в режиме холостого хода, и ток возбуждения уменьшается. Значит, уменьшаются ЭДС генератора и напряжение на его зажимах.
Когда напряжение в цепи резисторов R2, R7 станет ниже напряжения пробоя стабилитрона Д13, он запирается, его сопротивление увеличивается, транзисторы Т1 и Т2 закрываются. Схема начинает работать в режиме максимальной отдачи, и напряжение генератора управления возрастает.
В измерительной части: диод Д8 предназначен для повышения стабильности работы транзистора Т1; конденсатор С2 служит для сглаживания пульсации напряжения генератора управления; диод Д9 предотвращает разряд конденсатора С2 на цепь регулятора. Настройку регулятора на заданное напряжение производят потенциометром R7.
В регулирующей части: диод Д6, шунтирующий обмотку возбуждения, на которую нагружен мультивибратор, является нелинейным разрядным сопротивлением; дроссель Др служит для уменьшения импульсов разрядного тока конденсатора С1 через гасящий тиристор Д12; цепочка RуДу ограничивает ток управления. Необходимыми элементами мультивибратора являются диоды Д1-Д7, стабилитроны Д10 и резистор К1.