Автомат продольной устойчивости (АПУС)
Автомат продольной устойчивости обеспечивает коррекцию динамических показателей управляемости до потребных для ручного управления величин, обеспечивающих комфортное управление самолетом.
Закон управления автомата продольной устойчивости имеет вид:

где: (3-44)

Задача расчета АПУС сводится к определению передаточных чисел  в законе управления автомата, обеспечивающих потребные для ручного управления показатели динамической управляемости скорректированного самолета. Величины динамических показателей управляемости задаются областями оценки продольной управляемости представленными в приложении 1 на рис. П1-2.
в законе управления автомата, обеспечивающих потребные для ручного управления показатели динамической управляемости скорректированного самолета. Величины динамических показателей управляемости задаются областями оценки продольной управляемости представленными в приложении 1 на рис. П1-2.
Структурная схема скорректированного с помощью АПУС самолета представлена на рис. 3-11.

|

|

|

|

|

|

|

|

|

|

|

|

|

|
Рис. 3-11. Структурная сема скорректированного с помощью АПУС самолета
Для вывода выражений, позволяющих определить передаточные числа закона управления, определим передаточную функцию скорректированного АПУС самолета, которая имеет вид:
 (3-45)
(3-45)
где: 

Показатели управляемости скорректированного с помощью АПУС самолета определятся выражениями:
- относительный коэффициент затухания короткопериодического возмущенного движения
 (3-46)
(3-46)
- собственная частота короткопериодического движения самолета
 (3-47)
(3-47)
- градиент перемещения по перегрузке
 (3-48)
(3-48)
Задаваясь значением  и
и  можно найти величины передаточных чисел в законе управления АПУС обеспечивающих потребные для ручного управления показатели управляемости самолета:
можно найти величины передаточных чисел в законе управления АПУС обеспечивающих потребные для ручного управления показатели управляемости самолета:
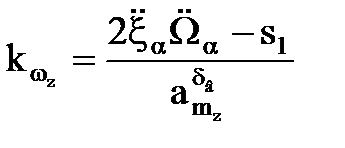 (3-49)
(3-49)
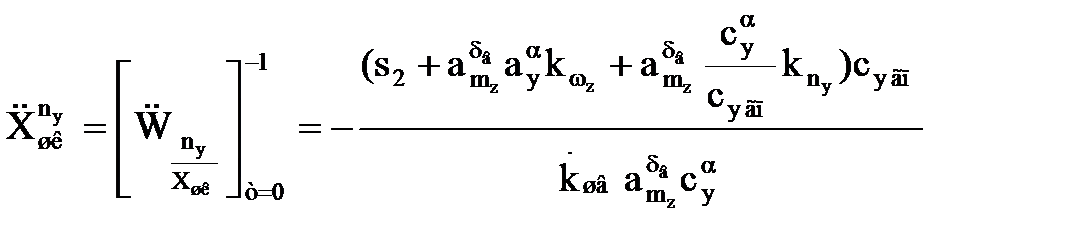
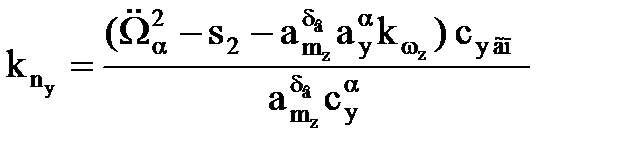 (3-50)
(3-50)
Автомат боковой устойчивости (АБУС)
Закон управления автомата боковой устойчивости имеет вид:
где: (3-51)

Задача расчета АБУС сводится к определению передаточных чисел  в законе управления автомата, обеспечивающих потребные для ручного управления показатели динамической управляемости скорректированного самолета. Величины динамических показателей управляемости задаются областями оценки продольной управляемости представленными в приложении 1 на рис. П1-2.
в законе управления автомата, обеспечивающих потребные для ручного управления показатели динамической управляемости скорректированного самолета. Величины динамических показателей управляемости задаются областями оценки продольной управляемости представленными в приложении 1 на рис. П1-2.
Структурная схема скорректированного с помощью АБУС самолета представлена на рис. 3-12.

|

|

|

|

|

|

|

|

|

|

|

|
Рис.3-12. Структурная сема скорректированного с помощью АБУС самолета
Поскольку порядок вывода выражений для определения передаточных чисел для АБУС ничем не отличается от порядка вывода соответствующих выражений для АПУС, ниже приводятся без вывода необходимые выражения:
-передаточная функция скорректированного с помощью АБУС самолета
 (3-52)
(3-52)
где: 

-относительный коэффициент затухания короткопериодического возмущенного движения
 (3-53)
(3-53)
- собственная частота короткопериодического движения самолета
 (3-54)
(3-54)
- градиент перемещения по перегрузке
 (3-55)
(3-55)
Задаваясь значением  и
и  определяем величины передаточных чисел в законе управления АБУС, обеспечивающих потребные для ручного управления показатели управляемости самолета по выражениям:
определяем величины передаточных чисел в законе управления АБУС, обеспечивающих потребные для ручного управления показатели управляемости самолета по выражениям:
 (3-56)
(3-56)
 (3-57)
(3-57)
Расчет параметров в законах управления автоматов управления