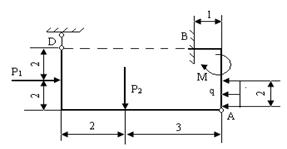
1. Исходные данные. Исходная схема системы двух тел показана на рисунке.

Дано: P1 = 6кН, P2 = 10 кН, М = 25кН∙м, q = 0,8кН/м. Линейные размеры указаны в метрах.
2. Классификация связей. A - гладкий цилиндрический шарнир, B - жесткая заделка, D - подвижная шарнирная опора.
3. Расчетная схема.
Для системы в целом:


4. Условия равновесия.
Для тела AB: ∑Xi = XB - P1 sin 60º - XA = 0
∑Yi = YB - P1 cos 60º - YA = 0
∑MBi = MB + P1 sin 60º - 1,5 Q + 3 XA - 3 YA = 0
Для тел AD: ∑Xi = XA = 0
∑Yi = YA - P2 + YD = 0
∑MAi = -P2 + M + 3 YD = 0
5. Определение реакций связей.
XB - 6∙0,86 - XA = 0
YB - 6∙0,5 - YA = 0
MB + 6∙0,86 - 1,5∙0,8∙3 + 3 XA - 3 YA = 0
XA = 0
YA - 10 + YD = 0
-10 + 25 + 3 YD = 0
6. Итоговые расчетные данные.
XA = 0; YA = 25кН; XB = 5,16кН; YB = 28кН; YD = -15кН; MB = 73,44кН∙м
Варианты заданий
Найти реакции связей составной конструкции, образованной двумя твердыми телами.
Исходные данные для расчета
| № вар. | P1, kH | P2, kH | M, кН∙м | q, кН/м | № вар. | P1, kH | P2, kH | M, кН∙м | q, кН/м |
| 1,0 | 2,6 | ||||||||
| 1,2 | 1,4 | ||||||||
| 2,3 | 3,3 | ||||||||
| 2,4 | 1,6 | ||||||||
| 3,5 | 3,9 | ||||||||
| 3,6 | 2,7 | ||||||||
| 1,0 | 1,7 | ||||||||
| 1,1 | 3,1 | ||||||||
| 2,5 | 4,0 | ||||||||
| 3,7 | 2,8 | ||||||||
| 1,2 | 1,8 | ||||||||
| 2,2 | 3,2 | ||||||||
| 3,8 | 1,3 | ||||||||
| 4,0 | 2,9 | ||||||||
| 1,3 | 3,3 |

|
|

|

|

|

|
|

|

| 10 
|

|

|

|

|
|

|

|

|
15 
|

|

|

|

|

|

|

|

|

|
25 
| 30 
|
Трение
Пример выполнения расчетно-графической работы
1. Исходные данные.
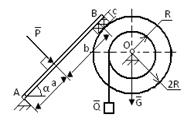
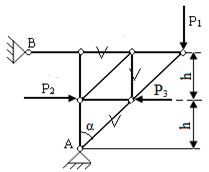
Исходная схема механической системы, состоящая из четырех тел, показана на рисунке.

Система состоит из груза 1, неподвижного блока 2, ступенчатого барабана 3, жесткого рычага 4 и тормозной колодки 5.
Данные для расчета: G=1,0kH, Q=10kH, a=2,0м, b= 1,2м, c=0,5м, f=0,1, α=45˚.
Требуется определить минимальное значение силы P, при котором система будет находиться в равновесии, и реакции связей O,A,B.
2. Классификация связей.
Связи O,A,B – гладкий цилиндрический шарнир;
Связи между грузом 1 и блоком 2, блоком 2 и барабаном 3 – гибкая связь;
Связь между барабаном 3 и тормозной колодкой 5 – шероховатая опорная поверхность.
3. Расчет системы.
Тело 1.

Тело 2.
Получаем: Т2 = T1 = 10kH; YB = 17kH; XB = 7kH.
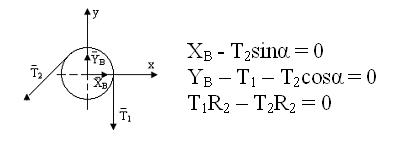
Тело 3.

Получаем: Fтр = T2/2 = 5kH; XO = Fтр – T2sinα = -2kH; N = Fтр/f = 50kH;
YO = N + G – T2cosα = 44kH.
Тело 4.

Получаем: XA = -Fтр = -5kH; P = (Nb + Fтрc)/a = 31,25kH;
YA = P – N = -18,75kH.
4. Результаты расчета
P = 31,25kH; XA = -5kH; YA = -18,75kH; XB = 7kH; YB = 17kH;
XO = -2kH; YO = 44kH.
Варианты заданий
Определить минимальное значение силы P и реакции опор механической системы, находящейся в покое. Необходимые для расчета данные и схемы конструкций приведены в таблицах.
Исходные данные для расчета
| вариант | G, kH | Q, kH | a,m | b, m | c, m | α, град | f0 | Точки определения реакций |
| 1,0 | 0,20 | 0,10 | 0,04 | 0,10 | O,A | |||
| 1,3 | 1,4 | 0,45 | 0,40 | 0,05 | 0,20 | О,А | ||
| 1,5 | 0,20 | 0,30 | 0,04 | 0,30 | О,А | |||
| 2,0 | 0,20 | 0,50 | 0,05 | 0,40 | О,А | |||
| 2,1 | 0,10 | 0,20 | 0,30 | О,А,В | ||||
| 1,1 | 0,10 | 0,15 | 0,15 | О,А,В | ||||
| 1,8 | 0,10 | 0,40 | 0,06 | 0,25 | О,А | |||
| 1,6 | 0,15 | 0,10 | 0,35 | О,А,В | ||||
| 2,2 | 0,20 | 0,10 | 0,35 | О,А,В | ||||
| 1,8 | 0,30 | 0,30 | 0,04 | 0,25 | О,А | |||
| 1,9 | 0,40 | 0,50 | 0,06 | 0,20 | О,А | |||
| 1,6 | 0,10 | 0,10 | 0,10 | О,А,В | ||||
| 1,8 | 0,10 | 0,15 | 0,20 | О,А,В | ||||
| 1,3 | 0,15 | 0,15 | 0,30 | О,А,В,С | ||||
| 1,7 | 0,50 | 0,20 | 0,06 | 0,40 | А,С,D | |||
| 2,0 | 0,10 | 0,25 | 0,15 | О,А,В | ||||
| 1,7 | 0,10 | 0,25 | 0,04 | 0,15 | О,А | |||
| 1,2 | 0,20 | 0,45 | 0,04 | 0,25 | О,А | |||
| 1,4 | 0,20 | 0,30 | 0,05 | 0,35 | О,А | |||
| 1,6 | 0,10 | 0,15 | 0,35 | О,А,В | ||||
| 3,0 | 0,10 | 0,10 | 0,10 | О,А,В | ||||
| 1,5 | 0,10 | 0,30 | 0,01 | 0,20 | О,А,В | |||
| 1,6 | 0,15 | 0,10 | 0,04 | 0,10 | О,А,В | |||
| 1,7 | 0,40 | 0,15 | 0,06 | 0,20 | О,А | |||
| 2,1 | 0,10 | 0,45 | 0,06 | 0,30 | О,А | |||
| 1,4 | 0,20 | 0,10 | 0,08 | 0,20 | О,А,В | |||
| 2,0 | 0,30 | 0,30 | 0,05 | 0,15 | О,А | |||
| 1,8 | 0,45 | 0,40 | 0,05 | 0,15 | О,А,В | |||
| 1,2 | 0,50 | 0,25 | 0,05 | 0,25 | О,А,В | |||
| 1,7 | 0,20 | 0,30 | 0,04 | 0,35 | О,А,В |
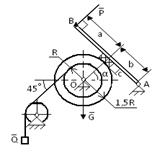
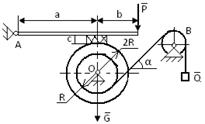
Таблица. Схемы конструкций

|

|
|

|

|

|
|

|

|

|
Продолжение таблицы

|

|

|

|

|

|

|

|

|

|
Окончание таблицы

|

|

|

|
|

|

|

|

|

|
Расчет плоских ферм
Пример выполнения расчетно-графической работы
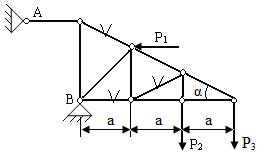
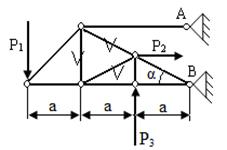
1. Исходные данные. Определить реакции связей фермы от заданной нагрузки, усилия во всех стержнях методом вырезания узлов, а так же в стержнях, отмеченных знаком V, определить усилия методом сечения.
P 1 = 5кН, P 2 = 5кН, P 3 = 5кН, α = 30º, a = 1м.

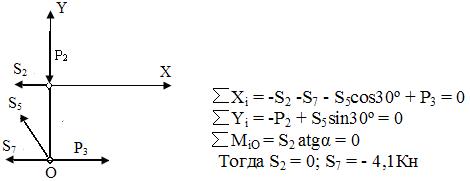
2. Расчетная схема для реакций связей.

3. Условия равновесия.
∑MA = RB∙a∙tg α + P3∙a∙tg α - P 1∙ a - P 2∙2 a = 0
∑FX = RB + P 3 + XA = 0
∑FY = YA - P 1 - P 2 = 0
4. Определение реакций связей.
0,57 RB + 2,85 - 5 - 10 = 0; RB + 5 + XA = 0; YA - 5 - 5 = 0
Тогда RB = 21,32кН; XA = - 26,32кН; YA = 10кН
5. Метод вырезания узлов.
Пронумеруем все стержни фермы.









| Номер стержня | |||||||
| Знак усилия | + | + | - | + | - | - | |
| Усилие, кН | 9,12 | 10,6 | 4,12 |
6. Метод сечений.
Варианты заданий
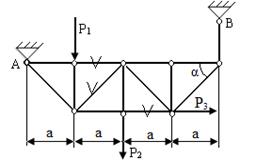
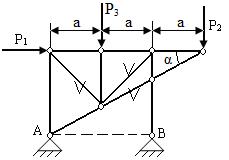
Определить реакции связей фермы от заданной нагрузки, усилия во всех стержнях методом вырезания узлов, а так же в стержнях, отмеченных знаком V, определить усилия методом сечения.
Исходные данные для расчета
| № вар. | P1 | P2 | P3 | a | h | α | № вар. | P1 | P2 | P3 | a | h | α | ||
| кН | м | град | кН | м | град | ||||||||||
| 2,0 | - | 4,4 | 3,3 | - | |||||||||||
| 4,0 | - | 3,0- | - | ||||||||||||
| 6,0 | - | - | |||||||||||||
| 4,4 | 3,3 | - | 1,5 | - | |||||||||||
| 5,0 | - | 4,0 | 4,0 | - | |||||||||||
| 3,2 | - | 1,0 | - | ||||||||||||
| 2,5 | - | 8,0 | 8,0 | - | |||||||||||
| 3,6 | - | 4,0 | 4,0 | - | |||||||||||
| 2,5 | 3,0 | - | 8,0 | - | |||||||||||
| 6,0 | - | - | 10,0 | ||||||||||||
| 4,0 | - | 2,0 | 4,0 | - | |||||||||||
| 4,0 | - | 5,0 | 5,0 | - | |||||||||||
| 3,0 | 3,0 | - | 7,0 | 7,0 | - | ||||||||||
| 3,0 | - | 5,0 | - | ||||||||||||
| 3,0 | - | 6,0 | 12,0 | - | |||||||||||
|

| ||||||||||||||

|

| ||||||||||||||
|

| ||||||||||||||

|

| ||||||||||||||

|

| ||||||||||||||

|

| ||||||||||||||

|

| ||||||||||||||

|

| ||||||||||||||

|

| ||||||||||||||
|

| ||||||||||||||

|

| ||||||||||||||

|

| ||||||||||||||

|

| ||||||||||||||

|
| ||||||||||||||
|

| ||||||||||||||
КИНЕМАТИКА
Основные понятия и определения
В задачах данного раздела определяются скорость и ускорение точки при различных способах задания движения, рассматриваются простейшие виды движения твердого тела, плоскопараллельное движение и сложное движение точки.
В зависимости от формы траектории движение точки бывает двух видов: прямолинейное и криволинейное.
Существует три способа задания движения точки.
Естественный способ заключается в том, что движение точки задано траекторией, как функцией, зависящей от времени. S = S(t). Зная уравнение движения точки можно определить пройденный путь, скорость точки в каждый момент времени, а также ускорение точки. При этом, определяется тип движения: равномерное, равноускоренное или равнозамедленное, ускоренное или замедленное.
Модуль скорости точки определяется по формуле V=dS/dt. Вектор скорости направлен по касательной к траектории.
Ускорение точки определяется как векторная сумма касательного и нормального ускорений точки:
Модуль полного ускорения

Модуль касательного ускорения определяется по формуле aτ=dV/dt. Вектор касательного ускорения направлен по касательной к траектории.
Модуль нормального ускорения определяется по формуле an=V2/ρ, где  – радиус кривизны траектории в данной точке. Вектор нормального ускорения
– радиус кривизны траектории в данной точке. Вектор нормального ускорения  всегда направлен по главной нормали в сторону центра кривизны траектории, поэтому это ускорение называют центростремительным.
всегда направлен по главной нормали в сторону центра кривизны траектории, поэтому это ускорение называют центростремительным.
Анализируя формулы касательного и нормального ускорений можно установить виды движений, как рассмотрено в таблице.
Виды движения точки в зависимости от ускорений
| Касательное ускорение aτ | Нормальное ускорение an | Ускорение a | Скорость V | Радиус кривизны траектории ρ | Вид движения |
| aτ=dv/dt aτ ≠ 0 | an = V2/ρ an ≠ 0 |

| V≠const | ρ≠∞ | неравномерное криволинейное |
| aτ=dv/dt aτ = 0 | an = V2/ρ an ≠ 0 | a = an | V=const | ρ≠∞ | равномерное криволинейное |
| aτ=dv/dt aτ ≠ 0 | an = V2/ρ an = 0 | a = aτ | V≠const | ρ=∞ | неравномерное прямолинейное |
| aτ=dv/dt aτ =const≠0 | an = V2/ρ an ≠ 0 |

| V≠const | ρ≠∞ | равнопеременное криволинейное |
| aτ=dv/dt aτ=const≠0 | an = V2/ρ an = 0 | a= aτ=const≠0 | V≠const | ρ=∞ | равнопеременное прямолинейное |
| aτ=dv/dt aτ = 0 | an = V2/ρ an = 0 | a = 0 | V=const | ρ=∞ | равномерное прямолинейное |
Рассмотрим координатный способ задания движения точки. Положение в пространстве движущейся точки определяется тремя координатами x=x(t); y=y(t); z=z(t).
Скорость точки представляет собой вектор, характеризующий быстроту и направление движения точки в данный момент времени. Проекции скорости на оси координат равны: Vx=dx/dt; Vy=dy/dt; Vz=dz/dt.
Модуль скорости

Характеристика быстроты изменения скорости - ускорение. Проекции ускорения на координатные оси: ax= d2x/dt2; ay= d2y/dt2; az= d2z/dt2.
Модуль ускорения:

Векторный способ задания движения точки применяется, когда движение точки определяется радиус-вектором, являющимся функцией, зависящей от времени r = r(t).
Различают два вида простейших движений твердого тела: поступательное и вращательное движения.
Из теоремы (при поступательном движении все точки твердого тела имеют одинаковые траектории, скорости и ускорения) следует, что поступательное движение определяется движением одной из его точек, поэтому тело принимаем за материальную точку и законы кинематики точки применимы для тела.
Вращательное движение характеризуется углом поворота, который называют угловым перемещением тела φ = φ(t).
Кинематическую меру вращательного движения, характеризующую быстроту углового перемещения называют угловой скоростью ω = dφ/dt.
Кинематическую меру вращательного движения, характеризующую изменения угловой скорости называют угловым ускорением ε = dω/dt.
Сравнивая формулы кинематики точки и формулы вращательного движения тела, можно заметить, что основные из этих формул аналогичны. Кинематические характеристики каждого вида движений соответственно характеру движения представлены в таблице.
Таблица
Кинематические характеристики поступательного и вращательного движений
| Кинематическая мера движения | Характер движения | Вид движения | |
| Поступательное | Вращательное | ||
| Перемещение | Равномерное | S = V · t | φ = ω·t |
| Неравномерное | S = f(t) | φ=f(t) | |
| Равнопеременное | S=S0 + V0t + at2/2 | φ=φ0 + ω0t + εt2/2 | |
| Скорость | Равномерное | V = S / t=const | V= R·ω |
| Неравномерное | V = dS / dt | ||
| Равнопеременное | V=V0 + a·t | ||
| Скорость угловая | Равномерное | ω = 0 | ω = φ / t =const |
| Неравномерное | ω = dφ / dt | ||
| Равнопеременное | ω = ω0 + ε·t; ω = π·n/ 30 | ||
| Касательное ускорение | Неравномерное | aτ = dV / dt | aτ = R·ε |
| Равнопеременное | aτ = (V-V0) / t | ||
| Ускорение нормальное | Неравномерное | an = V2 / ρ | an = ω2· R |
| Равнопеременное | |||
| Полное ускорение | Неравномерное | a = √ an2 + aτ2 | a = R·√ε2 + ω4 |
| Равнопеременное | |||
| Ускорение угловое | Неравномерное | ε = 0 | ε = dω / dt |
| Равнопеременное | ε = (ω- ω0) / t |
Движение, при котором все точки тела перемещаются в плоскостях, параллельных какой-то одной плоскости, называют плоскопараллельным движением.
Исследование движения точек фигуры при плоскопараллельном движении.
1. Для определения мгновенного центра скоростей достаточно знать направление скоростей двух любых точек фигуры, мгновенный центр скоростей находится в точке пересечения перпендикуляров, опущенных из этих точек к их скоростям.
2. Скорости точек плоской фигуры пропорциональны их расстояниям до мгновенного центра скоростей: VA/PA=VB/PB, где P – мгновенный центр скоростей, A и B – любые точки плоской фигуры.
Сложное движение точки следует рассматривать как составное движение: относительное движение (движение точки относительно подвижной системы координат) и переносное движение (движение подвижной системы координат относительно неподвижной).
При сложном движении абсолютная скорость точки равна геометрической сумме относительной и переносной скоростей,
При сложном движении ускорение точки равно геометрической сумме относительного, переносного и кориолисова ускорений. Кориолисово ускорение равно удвоенному векторному произведению переносной угловой скорости и относительной скорости точки:  Направлен вектор перпендикулярно плоскости, проходящей через векторы переносной угловой скорости и относительной скорости точки в сторону поворота вектора переносной угловой скорости к вектору относительной скорости против хода часовой стрелки. По модулю Кориолисово ускорение определяется по формуле aкор = 2ωVотsinα, α – угол между вектором угловой скорости и вектором относительной скорости.
Направлен вектор перпендикулярно плоскости, проходящей через векторы переносной угловой скорости и относительной скорости точки в сторону поворота вектора переносной угловой скорости к вектору относительной скорости против хода часовой стрелки. По модулю Кориолисово ускорение определяется по формуле aкор = 2ωVотsinα, α – угол между вектором угловой скорости и вектором относительной скорости.
Кинематика точки