Задача С.1 Определение реакций опор одного тела: плоская система сил.
Жёсткая рама, расположенная в вертикальной плоскости, закреплена в точке А неподвижным шарниром, а в точке B подвижным шарниром (рис 1, 2). На участке АС действует равномерно распределенная нагрузка интенсивности q. К раме приложена пара сил с моментом M и сила F. Значения F, M, q, a, α приведены в таблице 1. Определить реакции связей в точках A и B.
Таблица 1 – Данные к задаче С1
| Номер варианта данных | F, кН | М, кН∙м | q, кН/м | а,м | α, град |

| 
|
Рисунок 1 – К задаче С1


Рисунок 2 – К задаче С1
Задача С.2 Определение реакций опор твердого тела: пространственная система сил.
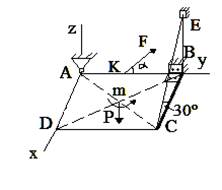
Однородная прямоугольная плита ABCD весом P (рисунки 3, 4) закреплена в точке А сферическим шарниром, в точке В цилиндрическим шарниром, в точке С или D нитью или невесомым стержнем. На плиту действует пара сил, лежащая в плоскости плиты; момент пары m. В точке К приложена сила F, лежащая в плоскости xy, точка К – середина стороны. Значения P, F, m, α, a, b приведены в таблице 2. Определить реакции связей в точках А, B, C или D.
Таблица 2 – Данные к задаче С2
| Номер варианта данных | P, кН | F, кН | m, кН∙м | α, град | АВ=а, м | ВС=b, м |

| 
| ||||

|

| ||||

| 
| ||||
| Рисунок 3 – К задаче С2 |
| 
|

| 
|
| Рисунок 4 – К задаче С2 |
Методические указания к решению задач по статике
Плоская система сил
При решении задач на равновесие твердого тела, находящегося под действием плоской произвольной системы сил, применяются уравнения равновесия в одной из следующих форм [1]:
– суммы проекций на декартовы оси координат и сумма алгебраических моментов всех сил системы относительно произвольной точки плоскости действия сил равны нулю:


– сумма проекций на некоторую ось и сумма алгебраических моментов всех сил системы относительно двух точек плоскости, не принадлежащих прямой, перпендикулярной к оси проекций, равны нулю:



– суммы алгебраических моментов всех сил системы относительно трех точек плоскости действия сил, не принадлежащих одной прямой, равны нулю:

Проекция силы на ось (рис. 5) записывается по формуле:
 .
.
Проекция будет положительна, если направлена в положительном направлении оси.

Рисунок 5 – Проекция силы
Алгебраическим моментом силы относительно данной точки называется взятое со знаком плюс или минус произведение модуля силы на ее плечо относительно этой точки (рис. 6), т.е., где h – плечо силы относительно точки А.

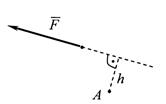

Рисунок 6 – Плечо силы Рисунок 7 – Пара сил
Момент считается положительным, если сила стремится вращать тело вокруг данной точки против часовой стрелки; если по часовой стрелке, то момент считается отрицательным.
Парой сил называется система двух равных по модулю, параллельных и противоположно направленных сил, приложенных к твердому телу (рис. 7). Алгебраический момент пары сил определяется по формуле
 ,
,
где d – плечо пары сил (рис. 7).
Правило знаков для алгебраических моментов силы и пары сил одинаково.
С целью получения более простых уравнений суммы моментов сил рекомендуется составлять относительно точек, через которые проходят линии действия неизвестных сил.
В тех случаях, когда запись момента усложняется из-за трудностей при нахождении плеча силы, удобно разложить ее на составляющие, для которых плечи легко определяются, и воспользоваться теоремой Вариньона:
 ,
,
где  ,
,  – составляющие силы
– составляющие силы  , т.е.
, т.е.  .
.
План решения задач
1) Выделить на рисунке твердое тело, равновесие которого следует рассмотреть.
2) Изобразить векторы сил и моменты пар сил задаваемой нагрузки, приложенной к выделенному телу.
3) Выбрать систему координат.
4) Освободить тело от связей (опор) и заменить их соответствующими реакциями связей. Основные виды связей и их реакции приведены в любом учебнике по теоретической механике (раздел «Статика»), например в [1].
5) Для системы сил, приложенных к телу, составить уравнения равновесия.
6) Решив полученную систему уравнений, определить неизвестные реакции связей.
Пример 1. Балка АВ (рис. 8) находится в равновесии. Сила G=10 кН, момент пары сил М=8 кНм, интенсивность распределенной нагрузки q=0,5 кН/м, Р=5 кН,; размеры указаны в м.
Определить реакции неподвижного цилиндрического шарнира А и невесомого жесткого стержня СD.
Решение: Рассмотрим равновесие балки АВ (рис. 8).
Изобразим задаваемые силы, действующие на балку: сила  , равнодействующая
, равнодействующая  равномерно-распределенной нагрузки, по величине равная
равномерно-распределенной нагрузки, по величине равная  кН и приложенная в середине участка действия этой нагрузки; пара сил с моментом М; сила
кН и приложенная в середине участка действия этой нагрузки; пара сил с моментом М; сила  натяжения троса, модуль которой равен P и которая направлена вдоль троса от балки.
натяжения троса, модуль которой равен P и которая направлена вдоль троса от балки.
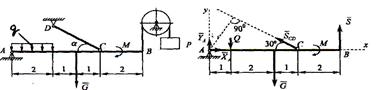
Рисунок 8 – К примеру 1 Рисунок 9 – К примеру 1
Отбрасываем связи: шарнирно-неподвижную опору А и невесомый жесткий стержень CD. Действие связей заменяем их реакциями (рис. 9). Реакцию опоры А представляем двумя составляющими  и
и  . Силу реакции стержня
. Силу реакции стержня  направляем вдоль стержня от балки (можно ввести ее и в обратном направлении).
направляем вдоль стержня от балки (можно ввести ее и в обратном направлении).
Для плоской произвольной системы сил, приложенных к балке, составляем три уравнения равновесия:






Решив систему уравнений, получим:
 кН.
кН.
 кН.
кН.
 кН.
кН.
Значения  ,
,  ,
,  получились положительными. Следовательно, принятые направления этих сил совпадают с их действительными направлениями.
получились положительными. Следовательно, принятые направления этих сил совпадают с их действительными направлениями.
Пример 2. Жесткая рама АВ (рис. 10) находится в равновесии. Интенсивность распределенной нагрузки q=1 кН/м, момент пары сил М=10 кНм, Р=5 кН,  =600; размеры – в м. Определить реакции жесткой заделки А.
=600; размеры – в м. Определить реакции жесткой заделки А.
 Рисунок 10 – К примеру 2 Рисунок 11 – К примеру 2
Рисунок 10 – К примеру 2 Рисунок 11 – К примеру 2
Решение: Рассмотрим равновесие жесткой рамы АВ (рис. 10). Укажем задаваемые силы, действующие на раму. Такими силами будут являться равнодействующие равномерно распределенных нагрузок на горизонтальном и вертикальном участках рамы – силы  и
и  , по модулю равные
, по модулю равные  кН,
кН,  кН и приложенные в серединах соответствующих участков; пара сил с моментом М; сила
кН и приложенные в серединах соответствующих участков; пара сил с моментом М; сила  натяжения троса, по модулю равная
натяжения троса, по модулю равная  и направленная вдоль троса от рамы. Отбрасываем связь – жесткую заделку в точке А. Действие жесткой заделки заменяем ее реакциями: двумя составляющими
и направленная вдоль троса от рамы. Отбрасываем связь – жесткую заделку в точке А. Действие жесткой заделки заменяем ее реакциями: двумя составляющими  и
и  силы и парой с моментом
силы и парой с моментом  . Для удобства составления уравнения моментов силу раскладываем на составляющие
. Для удобства составления уравнения моментов силу раскладываем на составляющие  и
и  (рис. 11), по величине равные:
(рис. 11), по величине равные:
 кН,
кН,
 кН.
кН.
Три уравнения равновесия будут иметь вид:



Из уравнений получаем:
 кН;
кН;
 кН;
кН;
 кН.
кН.