Изобразим схему для расчета механизма.
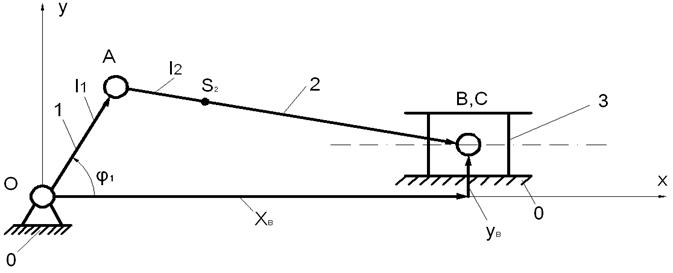
Рисунок 3.4. Расчетная схема рычажного механизма.
По данной расчетной схеме получаем следующее векторное уравнение:
где  - вектор кривошипа;
- вектор кривошипа;  - вектор шатуна;
- вектор шатуна;  - осевое смещение ползуна;
- осевое смещение ползуна;  - вектор перемещения ползуна.
- вектор перемещения ползуна.
принимаем равным нулю, так как в нашем случае смещение вдоль оси y отсутствует.
Для составления алгоритма зададим следующие условия:
Угол поворота кривошипа  может находиться в пределах
может находиться в пределах  .
.
Шаг примем равным  .
.
 (i-1);
(i-1);
где  - переменная угла положения кривошипа;
- переменная угла положения кривошипа;  - шаг угла положения кривошипа; i- номер положения.
- шаг угла положения кривошипа; i- номер положения.

где  - координата точки А по оси ОХ;
- координата точки А по оси ОХ;  -проекция вектора численно равная длине кривошипа.
-проекция вектора численно равная длине кривошипа. 
где  - координата точки А по оси ОY.
- координата точки А по оси ОY.
где  - координата точки В по оси ОХ;
- координата точки В по оси ОХ;  -проекция вектора численно равная длине шатуна.
-проекция вектора численно равная длине шатуна.
где  - угол поворота шатуна.
- угол поворота шатуна.
где  -смещение оси движения ползуна.
-смещение оси движения ползуна.
где  - первая передаточная функция шатуна.
- первая передаточная функция шатуна.

где  - первая передаточная функция ползуна.
- первая передаточная функция ползуна.

где  - вторая передаточная функция шатуна.
- вторая передаточная функция шатуна.

где  -вторая передаточная функция ползуна.
-вторая передаточная функция ползуна.

где  - координата центра масс шатуна по оси ОХ.
- координата центра масс шатуна по оси ОХ.

где  - координата центра масс шатуна по оси ОY.
- координата центра масс шатуна по оси ОY.

где  - первая производная координаты центра масс шатуна по обобщенной координате.
- первая производная координаты центра масс шатуна по обобщенной координате.

где  - первая производная координаты центра масс шатуна по обобщенной координате.
- первая производная координаты центра масс шатуна по обобщенной координате.

где  - вторая производная координаты центра масс шатуна по обобщенной координате.
- вторая производная координаты центра масс шатуна по обобщенной координате.

где  - вторая производная координаты центра масс шатуна по обобщенной
- вторая производная координаты центра масс шатуна по обобщенной
координате.

где  - максимальная координата точки В ползуна.
- максимальная координата точки В ползуна.
где  - расстояние от максимального отклонения до заданного положения.
- расстояние от максимального отклонения до заданного положения.
Расчет в одном контрольном положении кинематических характеристик механизма.
|
|
Для выполнения данных расчетов нам необходимо знать следующие величины:
 м;
м;
 м;
м;
 м.
м.
Данный алгоритм используем для заданного контрольного положения при  =11, при котором угол φ1=600.Результаты расчетов и ход расчетов отображены в следующей таблице.
=11, при котором угол φ1=600.Результаты расчетов и ход расчетов отображены в следующей таблице.
Таблица 3.2. Результаты расчета аналитического метода.
| Парамет ры | Формула | Размерность | Результат |
| xA | 
| м | 0,031 |
| yA | 
| м | 0,054 |
| хB | 
| м | 0,312 |

| 
| - | 0,979 |

| 
| - | -0,188 |

| 
| - | -0,110 |

| 
| м | -0,059 |

| 
| - | 0,191 |

| 
| - | -0,024 |

| 
| м | 0,124 |

| 
| м | 0,036 |

| 
| м | -0,056 |

| 
| м | 0,021 |

| 
| - | -0,029 |

| 
| - | 0,037 |

| 
| м | 0,349 |

| 
| м | 0,037 |
Сравниваем результаты расчетов, полученные графическим и аналитическим методами.
Таблица 3.3. Сравнение результатов расчетов.
| Переменная | Размерность | Графический метод | Аналитический метод | ||
| хB | м | 0,312 | 0,312 | ||
| φ2 | град | ||||
| xS2 | м | 0,120 | 0,120 | ||
| Продолжение Таблица 3.3. | |||||
| yS2 | м | 0,036 | 0,036 | ||
| i21 | - | -0,110 | -0,110 | ||
| i31 | м | -0,059 | -0,059 | ||
|
| м | -0,056 | -0,056 | ||

| м | 0,021 | 0,021 | ||
| SB | м | 0,037 | 0,037 | ||
Выбор динамической модели и ее обоснование.
Для упрощения решения задачи динамического синтеза машинный агрегат заменим динамической моделью в виде вращающегося звена, закон движения которого совпадает с законом движения начального звена кривошипно-ползунного механизма (кривошипа 1), т.е. обобщенная координата  , угловая скорость звена приведения
, угловая скорость звена приведения  , угловое ускорение
, угловое ускорение  .
.
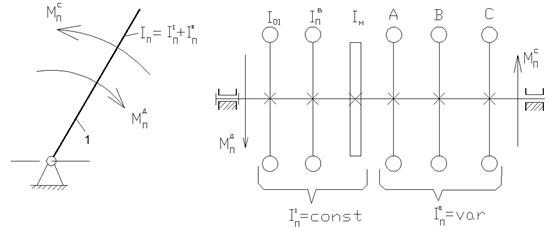
Рисунок 3.5. Динамическая модель машинного агрегата.
В качестве динамической модели рассматривается звено приведения – кривошип 1, которое имеет приведенный момент инерции-  и находится под действием приведенного момента включающий следующие составляющие:
и находится под действием приведенного момента включающий следующие составляющие:
|
|
где  - приведенный момент;
- приведенный момент;  - приведенный момент движущих сил;
- приведенный момент движущих сил;  - приведенный момент сил сопротивления.
- приведенный момент сил сопротивления.
Приведенный момент инерции включает две составляющие:

где - приведенный момент инерции;  - постоянная составляющая приведенного момента инерции;
- постоянная составляющая приведенного момента инерции;  -переменная составляющая момента инерции.
-переменная составляющая момента инерции.
В величину постоянной составляющей входят следующие составляющие:
где  - собственный момент инерции кривошипа;
- собственный момент инерции кривошипа;  - приведенные моменты инерции вращающихся звеньев механизма;
- приведенные моменты инерции вращающихся звеньев механизма;  - момент инерции маховика.
- момент инерции маховика.
Момент инерции маховика определяется на основании заданной степени неравномерности движения звена приведения.