
СИСТЕМА УПРАВЛЕНИЯ РУЛЕМ ВЫСОТЫ:
| От гидросистемы |
| Кинематический механизм изменения Кш РВ и загрузки штурвалов |
| Переключатель аварийного отключения ограничений РВ |
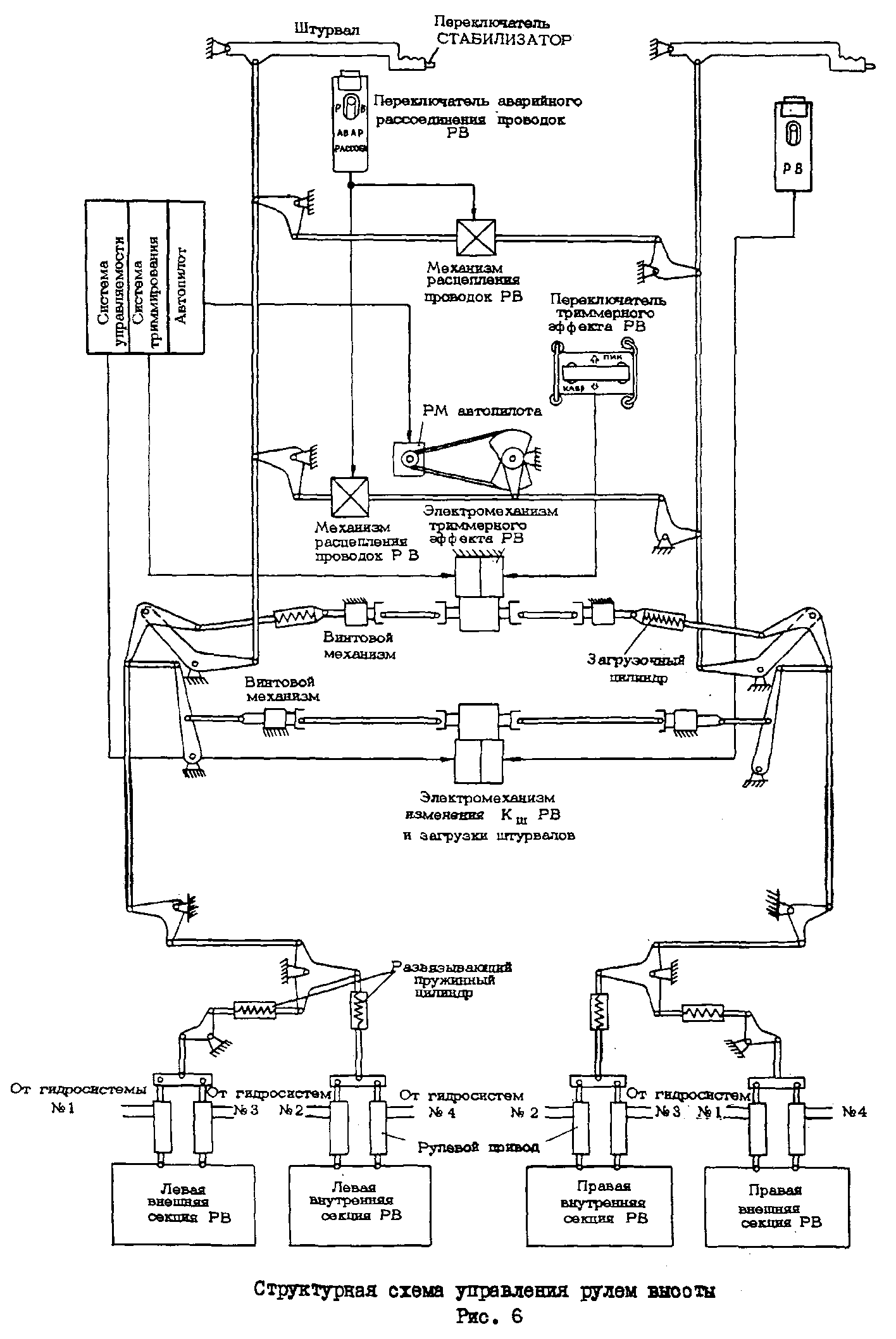
Управление рулем высоты (см. рис. 3)
С помощью РB и стабилизатора осуществляется продольное управления самолетом, при этом РB используется для маневрирования в вертикальной плоскости.
РВ разделен на четыре секции. Каждая секция отклоняется двумя совместно работающими рулевыми приводами, получающими питание от различных гидросистем.
Управление РВ производится с помощью колонок штурвалов. Проводки от штурвалов к РВ проложены по разным бортам и соединены между собой двумя механизмами расцепления. При соединенных проводах управление может производиться от любого штурвала. В случае необходимости проводки могут быть разъединены при любом положении штурвалов. Расцепление проводок, производится с помощью переключателя, расположенного на центральном пульте. Обратное соединение проводок в полете не предусмотрено. При расцепленных проводках управление по тангажу производится от штурвала, имеющего исправную проводку, с помощью двух секций РВ. К проводкам управления РВ подсоединены: рулевая машина автопилота, загрузочные цилиндры и электромеханизм изменения Кш.
Рулевая машина автопилота отклоняет РВ с передачей перемещения проводки на штурвалы. При этом угол отклонения РВ не превышает ±10°.
Загрузку на штурвалах создают два загрузочных цилиндра. Вторыми концами загрузочные цилиндры соединены с электромеханизмомтриммирования. Снятие нагрузки, создаваемой загрузочными цилиндрами при отклонении колонок штурвалов, производится автоматически по сигналам системы триммирования (см. 22.00.00) или вручную с помощью переключателя, установленного на центральном пульте. При расцеплении проводок каждый загрузочный цилиндр остается подключенным к своей проводке управления и загрузка на управляющем штурвале будет в два раза меньше обычной.
Электромеханизм изменения Кш и загрузки штурвалов подключен к кинематическим механизмам изменения Кш и загрузки штурвалов, имеющимся в левой и правой проводках.
| От гидросистемы |
Балансировка самолета по тангажу производится с помощью стабилизатора по принципу удержания РB в положении, близком к нейтральному. При отклонении РВ на пикирование на угол более 2° на время более 5 с на левой панели приборной доски пилотов начинает мигать желтое табло-стрелка с надписью сверху "ПЕРЕСТАВЬ СТАБ НА ПИКИPОB", при отклонении на кабрирование на угол более 2° - табло-стрелка с надписью снизу "ПЕРЕСТАВЬ СТАБ НА КАБРИР". Пилот обязан отклонить стабилизатор в указанном стрелкой направлении в положение, при котором потребный угол отклонения РВ будет близок к 0°.
Перед рулевыми приводами секций РВ установлены развязывающие пружинные цилиндры.
Расчет усилия на штоке
Нагрузка на шток гидроцилиндра будет состоять в основном из аэродинамических сил (Rа):
 ,
,
где Cp – коэффициент давления; ρ – плотность воздуха; V – скорость невозмущенного потока,
S – площадь секции РВ; α – угол отклонения РВ.

Поскольку к секции РВ подведено 2 гидроцилиндра, то будем иметь нагрузку на штоке одного из них: R=Rа/2=13811≈14·103
РАСЧЕТ ПАРАМЕТРОВ И ПОТРЕБНОЙ МОЩНОСТИ
ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА
Данные для расчета:
1. рабочее давление……………………………………………. Рнаг=20.6 МПа
2. давление слива……………………………………………… Рслив= 0.0588 МПа
3. рабочий ход гидроцилиндра……………………………….. хГЦ=75·10-3 м
4. усилие на штоке…………………………………………….. R=14·103 Н
5. механический КПД…………………………………………. ηмех=0.95
6. материал гидроцилиндра…………………………………… сталь, σ=100 МПа
Шток необходимо рассчитать на прочность по допускаемым напряжениям по формуле:

определим 
Принимаем dШ Т = 14·10-3 м.
Определим площадь (и диаметр) поршня из уравнения баланса сил:

 м; принимаем диаметр поршня равным
м; принимаем диаметр поршня равным  м.
м.
Определим отношение  . Из опыта установлено, что оптимальное соотношение
. Из опыта установлено, что оптимальное соотношение 
Определим ширину поршня из условия прочности:

Подставляя численные значения получаем:  м.
м.
Принимаем  м.
м.
Определим необходимость расчета гидроцилиндра на продольный изгиб. Необходимым условием расчета является неравенство:  .
.
где: Lцил – длина гидроцилиндра с выдвинутым штоком;
Dнар – наружный диаметр гидроцилиндра;
 , где
, где
 - толщина стенки гидроцилиндра.
- толщина стенки гидроцилиндра.
μ=[для стали]=0.3 – коэффициент Пуассона.
 м
м
принимаем  м.
м.
Окончательно получаем  м.
м.
Толщина (сферического) донышка гидроцилиндра: 

принимаем  м;
м;
Длина гидроцилиндра:
 м.
м.
Видим, что  расчет на продольный изгиб не нужен.
расчет на продольный изгиб не нужен.
Рассчитаем расход Qцил необходимый для работы гидроцилиндра: 
где:  - скорость срабатывания
- скорость срабатывания
τ = 2 с – время срабатывания
 м/с.
м/с.
 м3/с – расчетная подача
м3/с – расчетная подача
 - фактическая подача гидроцилиндра (с учетом потерь)
- фактическая подача гидроцилиндра (с учетом потерь)
 м3/с.
м3/с.
Диаметр входного и выходного отверстия, исходя из обеспечения требуемого расхода (при ωвх= 5…10 м/с) равен: 
при ωвх= 7 м/с  м;
м;
Принимаем  м.
м.
Минимальный диаметр узла крепления выходного звена определяется из условия прочности на срез крепежного болта:
 м
м
Принимаем  м.
м.
Формула для определения потребной мощности гидроцилиндра имеет вид:

где: ∆P = Pнаг – Pслив = (20.6 – 0.0588)*106 = 20.541 МПа
 Вт.
Вт.