Сложное движение свойственно шатунам. На рис.3.3. показан шатун и план его ускорения.
 Рисунок3.3 - Силы инерции при сложном движении звена
Рисунок3.3 - Силы инерции при сложном движении звена
|
Движение центра масс звена можно представить как сумма: вместе с какой-либо точкой - переносное и вращение вокруг этой точки – относительное. Математическая модель в нашем случае запишется:

Соответственно и сила инерции звена – сумма поступательного и вращательного движений:
Определение величины, направления и точки приложения этих сил рассмотрены выше: в п.п. 3.2.1. и 3.2.2. Руководствуясь этими положениями, можно привести порядок определения силы инерции звена, совершающего сложное движение.
1. Через центр масс звена провести направление, параллельное ускорению точки, движение которой принято за переносное – линии действия сил инерции от переносного движения. На рис.3.3. через S проведена линия 1, параллельно  .
.
2. По формуле 2.28 вычислить положение точки приложения силы инерции от вращательного движения. На примере:

Через эту точку провести линию, параллельную ускорению относительного движения – линию действия силы инерции от вращательного движения. На рис.3.3. линия 2 – параллельная (as).
3. Через точку пересечения этих двух направлений провести вектор силы инерции звена, параллельно ускорению центра масс. На примере: Pu параллельна ускорению as и противоположно ему направлена. Проходит Pu через T - точку пересечения линии 1 и 2. Величина:

ОПРЕДЕЛЕНИЕ РЕАКЦИИ В КИНЕМАТИЧЕСКИХ ПАРАХ.
ИСХОДНЫЕ ПРЕДПОСЫЛКИ.
Определение реакций в кинематических парах с учетом сил инерции звеньев называют кинетостатическим расчетом. В первом приближении при этом трения в кинематических парах не учитывают, т.е. находят только нормальные составляющие реакции в соединениях.
Плоская кинематическая цепь включает пары IV и V классов, определение реакции в которых рассмотрены ниже.
 Рисунок 3.5 - Реакция в высшей кинематической паре
Рисунок 3.5 - Реакция в высшей кинематической паре
|
Если звенья 1 и 2 образуют пару IV класса и касаются в точке А (рис.3.5. а), то R12 - реакция звена 1 на звено 2 (рис3.5.б) и R21 - реакция звена 2 на звено 1 (рис.3.5. в)
R12= - R21
R12 следует читать: реакция звена 1 на звено 2, а не R двенадцать и R21 - реакция звена 2 на звено 1.
Найти реакцию R12 - значит вычислить только величину, т.к. остальные два параметра (направление и точка приложения) известны. Направлена она по нормали (n-n) к профилям в точке их касания и приложена в точке А.
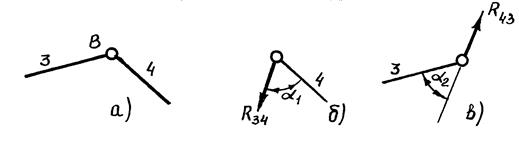 Рисунок 3.6 - Реакция в низшей кинематической паре
Рисунок 3.6 - Реакция в низшей кинематической паре
|
Звенья 3 и 4 образуют вращательную пару V класса – шарнир В (рис.3.6. а). Реакция в кинематической паре проходит через центр шарнира, т.е. известна точка ее приложения. Не известны величина и направление реакции.
R43 - реакция звена 4 на звено 3 (рис.3.6, в), а R34 - реакция звена 3 на звено 4 (рис.3.6,б). Подлежат определению величина и направление. Удобно представить в виде:

где  - параллельно звену 3
- параллельно звену 3  , а
, а  - перпендикулярно звену 3
- перпендикулярно звену 3  .
.
 Рисунок 3.7 - Реакция в поступательной паре
Рисунок 3.7 - Реакция в поступательной паре
|
Пусть звенья 5 и 6 образуют поступательную пару класса (рис.3.7, а). Реакция в поступательной паре принято обозначать Nij, N65 - реакция звена 6 на звено 5 (рис.3.7, б). Известно, что N65 перпендикулярна к направляющей. Не известны величин и точка приложения.