Пример 1: Известный массы звеньев m5=1,5 кг, m3=4,4 кг, сила полезного сопротивления Рпс=5 кН, моменты инерции звеньев, относительно оси проходящий через центр тяжести JS3=0,2 кг·м2.
1. Определить силы инерции звеньев:

 ,
,  ,
,
где  - берется из кинематического анализа механизма (рис3.11. б).
- берется из кинематического анализа механизма (рис3.11. б).
2. Определить на схеме механизма точки приложения и направления силы инерции звеньев (рис.3.11. а):

Рисунок 3.11 – Схема приложения силы инерции звеньев механизма
1. через точку С проводим линию çê  и укажем направление силы инерции 5 звена
и укажем направление силы инерции 5 звена  противоположно вектору ;
противоположно вектору ;
2. находим точку качения К звена 3 по формуле:

3. через точку К проводим линию çê  и укажем направление силы инерции 3 звена
и укажем направление силы инерции 3 звена  противоположно вектору .
противоположно вектору .
3. Определить силы тяжести звеньев и приложить на схеме механизма (рис. 3.11. а):
 ,
, 
4. Отделить от схемы механизма (4-5) группы Ассур(рис. 3.11. в).
1. переносить все внешние силы (, G5, P) сохраняя направления и точки приложения (рис. 3.11. в);
2. приложить к звену 5 реакцию N05 çê(Оу) и 4 звену реакцию N34 çê(Оx)(рис. 3.11. в);
3. Составить уравнение равновесия сил;

4. Вычислить масштаб сил  ,
,
где Fmax - сила максимальная по величине из всех известных сил.
5. Построить силовой многоугольник (4-5) группы Ассур (рис. 3.11. г):
1. проводим линию çê N34 и на ней отметим точку о;
2. через точку о проводим линию çê длиной  в сторону направления силы инерции ;
в сторону направления силы инерции ;
3. через точку а проводим линию çêG5 длиной  сохраняя направления силы;
сохраняя направления силы;
4. через точку в проводим линию çêP длиной  в сторону направления силы Р;
в сторону направления силы Р;
5. через точку с проводим линию çêN05 до пересечения с линией силы N34 в точке d.
6. вычислить величину неизвестных реакции (рис. 3.11. г):
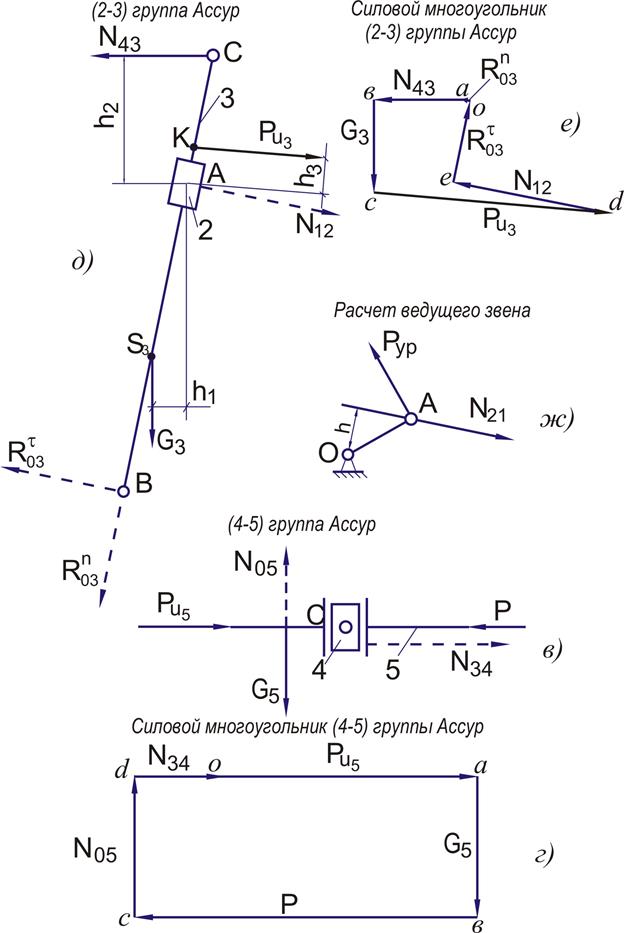
Рисунок 3.11 – Силовой анализ механизма
 ,
,  ,
,
где (cd) и (do) берется из построенного силового многоугольника с рисунка 3.11. г.
6. Отсоединить от механизма следующую (2-3) группы Ассур (рис. 3.11. д):
1. переносим все внешние силы (, G3) сохраняя направления и точки приложения (рис. 3.11. д);
2. приложим к звену 3 в точке В реакцию опоры  ^ (АВ),
^ (АВ),  çê(АВ), в точке С реакцию N43 çê N34 , противоположно направленной ей и в точке А - реакцию N12 ^ (АВ) (рис. 3.11. д);
çê(АВ), в точке С реакцию N43 çê N34 , противоположно направленной ей и в точке А - реакцию N12 ^ (АВ) (рис. 3.11. д);
3. Составим уравнение равновесия сил;

4. Из уравнения равновесия моментов находим реакцию
 откуда
откуда
 ,
,
где h1, h2, h3 – измеряется из чертежа в мм (рис. 3.11. д).
7. Построить силовой многоугольник (2-3) группы Ассур (рис. 3.11. е):
1. проводим линию çê N12 и на ней отметим точку о;
2. через точку о проводим линию çê  длиной
длиной  в сторону направления силы инерции ;
в сторону направления силы инерции ;
3. через точку а проводим линию çêG3 длиной  сохраняя направления силы;
сохраняя направления силы;
4. через точку в проводим линию çêN43 длиной  в сторону направления силы N43;
в сторону направления силы N43;
5. через точку с проводим линию çê  длиной
длиной  в сторону направления реакции ;
в сторону направления реакции ;
6. через точку d проводим линию çê  до пересечения с линией силы N12 в точке е.
до пересечения с линией силы N12 в точке е.
7. вычислить величину неизвестных реакции:
 ,
,  .
.
где (ео) и (dе) берется из построенного силового многоугольника с рисунка 3.11. е.
Расчет ведущего звена
1. Отсоединяем ведущее звено от механизма (рис. 3.11. ж):
2. В точку А приложим силу Рур ^ (ОА) и реакцию  çê
çê  противоположную сторону направления и равной по величине (
противоположную сторону направления и равной по величине ( ) (рис. 3.11. ж);
) (рис. 3.11. ж);
3. Вычисляем  , где (ОА), h – измеряется из чертежа в мм
, где (ОА), h – измеряется из чертежа в мм
Рычаг Жуковского
1. Построим повёрнутый на 90о план скорости механизма (рис. 3.11. з);
2. На этом плане определяем точки, одноимённые точкам, в которых на кинематической схеме к звеньям приложены силы, используя свойства плана скоростей из пропорции:
 ,
, 
В одноименные точки перенесем силы: G3, , P,  , G5 и уравновешивающую силу Рур приложим в точке а 1^(ра 1) (рис. 3.11. з).
, G5 и уравновешивающую силу Рур приложим в точке а 1^(ра 1) (рис. 3.11. з).
3. Составим условие равновесия рычага Н.Е. Жуковского

 ,
,
где значения h, h 1, (pс 5), (pа 1) берем из чертежа (рис. 3.11. з)
4. Достоверность расчетов Рур можно оценить отношением разности результатов из п. 8 и 9 к их среднеарифметической величине:

Пример2: Известный массы звеньев m5=13 кг m4=10 кг, m3=15 кг, m2=8 кг сила полезного сопротивления Рпс=15000 Н, моменты инерции звеньев, относительно оси проходящий через центр тяжести JS2 =0,03 кг м2, JS3= =0,075 кг м2, JS4 =0,03 кг м2.
1. Определить силы инерции звеньев пользуясь положением в 3.2: Определить силы инерции звеньев:
 ,
,
 ,
,
 ,
,
 ,
,
где  - берется из кинематического анализа механизма (рис3.12. б).
- берется из кинематического анализа механизма (рис3.12. б).
2. Определить на схеме механизма точки приложения и направления силы инерции звеньев: