Ротор, имеющий дисбаланс приводит к колебаниям вала. Центр вала движется во время вращения по траектории, именуемой кинетической траекторией вала. В идеальных условиях, то есть, в случае изотропного вала и изотропных подшипников, кинетическая траектория, вызванная дисбалансом, составляет круг для каждого сечения ротора. Но обычно подшипники машин анизотропные, то есть, они имеют разную податливость в своих обоих главных направлениях жесткости. Поэтому их кинетическая траектория вала принимает характер эллипса, который, в крайнем случае, может приобрести форму прямой (Рисунок 1.5).
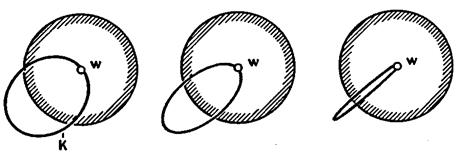
W – центр вала или центр вращения ротора
К – кинетическая траектория вала
Рисунок 1.5 – Вызванная дисбалансом кинетическая траектория вала с изотропными и анизотропными подшипниками
Величина, форма и положение кинетической траектории вала изменяется в зависимости от числа оборотов. Обычно кинетические вылеты вала достигают максимума при критической скорости вращения.
Кинетическая траектория вала содержит все информации о колебаниях вала ротора. Для полной регистрации кинетической траектории вала, то значит, движения вала в одной радиальной плоскости ротора, именно в этой плоскости следует закрепить два датчика, в двух перпендикулярных друг к другу направлениях (Рисунок 1.6). Для полного учета кинетической траектории вала, в радиальной плоскости следует установить два датчика под 90° один к другому.
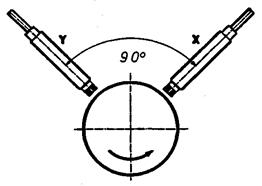
Рисунок 1.6 – Расположение датчиков
Каждый датчик принимает измеряемые в его монтажном направлении вибросмещения вала  и
и  . Синфазное сложение мгновенных вибросмещений дает мгновенную кинетическую амплитуду вала в плоскости измерения:
. Синфазное сложение мгновенных вибросмещений дает мгновенную кинетическую амплитуду вала в плоскости измерения:
Примеры временной зависимости вибросмещений и соответствующих кинетических траекторий валов показаны на рисунке 1.7 и 1.8. В самом простом случае, при одной только частоте, кинетическая траектория вала эллипс (рисунок 1.8). Собранные вместе колебания приводят, в зависимости от свойственного им частотного спектра, к большему или меньшему искажению кинетической траектории вала (рисунок 1.7).
Из возможных величин измерения, как-то: висбросмещение, колебательная скорость и ускорение, решающей величиной для колебаний вала выделено вибросмещение (единица измерения:  ).
).
Вибросмещение определяют двумя характеристиками:
a) максимальная амплитуда 
b) наибольший размах колебаний 
Причем для определения состояния, достаточно одной, только из этих двух величин. Измерение колебаний вала следует всегда проводить в зоне опоры.
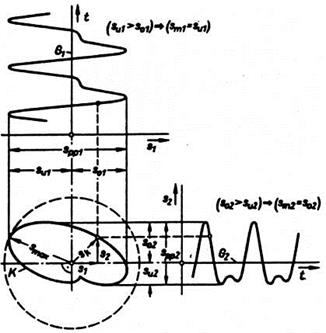
Рисунок 1.7 – Примеры временной зависимости вибросмещений и соответствующих кинетических траекторий валов все присутствующие колебания
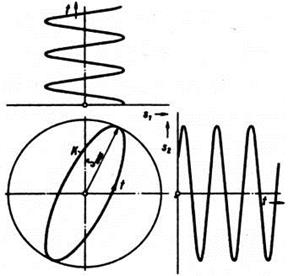
Рисунок 1.8 – Примеры временной зависимости вибросмещений и соответствующих кинетических траекторий валов только при одной частоте
Максимальная амплитуда колебаний - определяется, как наибольшее значение кинетической амплитуды  в плоскости измерения (рисунок 1.7):
в плоскости измерения (рисунок 1.7):
За величину определения в Европе и, особенно в Германии предпочтительно принимается максимальная амплитуда. Это соответствует требованиям рекомендации 2059 VDI, которые обосновывают рекомендуемые предельные значения исключительно на максимальной амплитуде.
Наибольший размах колебаний - определяются, как наибольшее значение, зарегистрированных в обоих направлениях измерения 1 и 2 размаха колебаний  и
и  (рисунок 1.7):
(рисунок 1.7):

Размахом колебания обозначается здесь значение от пика до пика вибросмешения.
В США и в промышленности предпочитают в качестве определяющей величины именно эту характеристику. Она согласна Стандарту API 670, однако, не соответствует VDI 2059, л. 1 по 5.
Вообще же, нет возможного прямого сравнения между характеристикой «максимального размаха» и «наибольшей амплитуды колебаний». Если нельзя было обойти это сравнение, то его можно произвести при соблюдении следующего отношения:
В зависимости от положения и вида кинетической траектории вала, при пересчете величин, следовательно, чтобы получить приблизительную максимальную амплитуду следует умножить значение большего размаха колебаний  на значение коэффициента между 0,5 и 0,7.
на значение коэффициента между 0,5 и 0,7.
Вибродатчик колебаний вала – для измерения относительных колебаний вала употребляются, в настоящее время, без исключения, только бесконтактные датчики вибросмещения, работающие по принципу вихревых токов. Эти датчики охватывают все движения ротора в диапазоне частот от 0 до 10000 Гц.
На конце каждого датчика встроена небольшая измерительная катушка, уложенная в особой эпоксидной смоле. Эта катушка, кабель датчика, удлинительный кабель и осциллятор составляют колебательный контур, питаемый несущей частотой в, приблизительно 1,2 МГц, (Рисунок 1.9).Измерительная схема по методу вихревых токов состоит из датчика, удлинительного кабеля и осциллятора
Под влиянием несущей частоты, вокруг измерительной катушки образуется электромагнитное переменное поле. Если подвести к этому полю электропроводящее тело, то оно вносит затухание катушки, и это позволяет определить, на каком расстоянии от катушки находится тело.
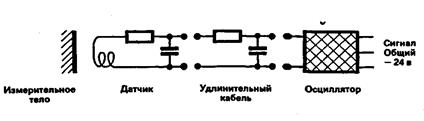
Рисунок 1.9 – Измерительная схема
На выходе осциллятора образуется постоянное напряжение и переменное напряжение с суперпозицией. Постоянное напряжение пропорционально среднему расстоянию между телом и катушкой, а переменное напряжение колебаниям тела. Эти напряжения могут быть замерены на приборах для измерения колебаний, учтены и контролированы.