В большинстве случаев определение состояния колебаний важных для производства и капиталоемких машин, машин с дистанционным управлением и машин с «тенденцией к колебаниям» с помощью переносных измерительных приборов недостаточно. В данном случае, для определения и сообщения каждой неполадки – а прежде всего, внезапно изменяющихся колебаний – требуются виброконтрольные установки, работающие в режиме непрерывного измерения.
Задача виброконтрольных установок состоит в надежной защите машин от повреждений вследствие колебаний. Для выполнения своей задачи, виброконтрольные установки с высокой надежностью должны обеспечивать данные операции:
a) Непрерывное измерение колебаний машин
b) Автоматическое сравнение измеряемых значений с заранее устанавливаемыми предельными значениями
c) Корректировка системой управления (В диапазоне предельных значений)
d) Срабатывание реле при превышении предельных значений для отключения машины
Виброконтрольные установки (рисунок 1.14) должны сигнализировать каждое нарушение предельных значений, которое приводит к превышению заранее установленной задержки срабатывания. Такую же важную роль играет исключение ложных сигнализаций, вызываемых помехами в системе контрольной электроники или в блоке питания. Современные контрольные установки оснащены многочисленными схемами – от схем шунтирования при отказе сети до «схем ОК» измерительных цепей датчиков, которые защищают от ложных сигнализаций. Благодаря этому, до значительной степени исключаются ложные сигнализаций, которые могут приводить к ненужным отключениям машин и потерям в производстве.
Для контроля действуют те же самые принципы как для измерения колебаний машин. Датчики, точки измерения и измеряемые величины идентичны. Предельные значения для предупреждения и отключения
a) определяются изготовителем машин, или
b) выводятся из нормального эксплуатационного состояния машины, или
c) берутся из указанных стандартов и директив.
У вентилятора (рисунок 1.15), опирающегося на подшипники качения, контролируются абсолютные колебания обоих подшипников. Обычно достаточно монтировать датчик виброскорости только в направлении максимального размаха колебаний, т.е., в большинстве случаев в горизонтальном направлении.

Рисунок 1.14 – Принципиальная схема прибора для контроля относительных колебаний валов в подшипнике скольжения

Рисунок 1.15 – Монтирование датчика к вентилятору
У турбокомпрессоров (рисунок 1.16) в подшипниках скольжения контролируются относительные колебания валов. Для этого, в каждый подшипник ввинчены два бесконтактных датчика перемещения, которые на 90° смещены друг относительно друга.

Рисунок 1.16 – Монтирование датчика к турбокомпрессору
В случае необходимости контроля колебаний отдельных машин в немногих точках измерения, как, например, вентиляторов, центрифуг и малогабаритных турбин, самое рентабельное решение предоставляют одно или двухканальные виброконтрольные приборы. Данные приборы жесткой конструкции включают в себя всю систему контрольной электроники с измерительным усилителем, реле предельных значений и блоком питания напряжением.
Большие машинные агрегаты, как турбоагрегаты на электростанциях и турбокомпрессоры требуют контроля колебаний на многочисленных опорных точках (Рисунок 1.7). Кроме колебаний, часто и следует проводить контроль других, важных для эксплуатации машины, измеряемых величин, как например:
a) относительных колебаний валов
b) абсолютных колебаний подшипников
c) осевых и радиальных смешений валов
d) эксцентриситета вала ротора
e) относительного удлинения вала
f) абсолютного расширения кожуха
g) числа оборотов
h) температуры
i) положения клапана
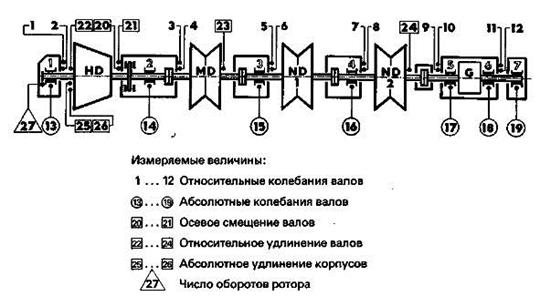
Рисунок 1.17 – Измеряемые величины и точки измерений для контроля парового турбоагрегата в 450 МВт
Решению таких задач способствует применение модульных контрольных установок, которые можно собирать из любых модулей в любом объеме, приспосабливать к каждой измеряемой величине и оснащать требуемыми для конкретной машины элементами
Диагноз колебаний машин
Если колебания машины превышают допустимые предельные значения, необходимо выяснить причины такого явления. Только если причины и возбудители колебаний известны, возможно, систематическое подавление этих колебаний.
Операции измерения и контроля дают возможность количественного описания вибрационной характеристики (рисунок 1.18). Качественное описание состава или причин и возбудителей колебаний машин возможно только после проведения диагноза колебаний, причем частотный анализ играет главную роль.

Рисунок 1.18 – Мероприятия для диагноза колебаний и систематического подавления колебаний машин
Частотный анализ – при частотном анализе смесь колебаний машин определяется с помощью вибродатчиков и путем измерительной техники разлагается на гармонические составляющие. Иными словами: Осуществляется анализ Фурье, результатом которого является определение всех возникающих частот колебаний с соответствующими амплитудами.
На рисунке 1.19 показан типичный пример механических колебаний электродвигателя. В верхней диаграмме показана вся смесь возникающих на поверхности машины колебаний в зависимости от времени. С помощью частотного анализа обнаруживается, что данная смесь колебаний состоит из трех дискретных колебаний. Первая составляющая смеси колебаний встречается с частотой в 25 Гц, что соответствует частоте вращения электродвигателя. Следовательно, причиной возникновения этой составляющей колебаний является дисбаланс электроякоря. Вторая составляющая колебаний встречается с частотой в 4 Гц. Причиной возникновения этой составляющей является приводимый ременным шкивом ремень, который в данном случае вращается с частотой в 4 Гц. Третья составляющая колебаний имеет частоту в 100 Гц и является типичной для машин переменного напряжения. Во время каждого периода сетевого напряжения магнитное поле электрической машины дважды перемагничивается, вследствие чего в статоре возникают переменные силы с двойной сетевой частотой, которые в свою очередь возбуждают листовые элементы статора к колебаниям с частотой f = 100 Гц.
Одновременное возникновение трех гармонических составляющих колебаний приводит к показанной в диаграмме вибрационной характеристике. Даже этот простой пример уже показывает, что только частотный анализ обеспечивает интерпретацию колебаний и точную идентификацию возбудителей колебаний. Нижеприведенный рисунок ясно показывает преимущества частотного анализа при подавлении колебаний машин. Изображены результаты частотного анализа в масштабе частоты, проведенного для строгального станка для дерева. В диаграмме указана виброскорость отдельных колебаний подшипников в зависимости от частоты. Для наглядности на обе оси нанесено логарифмическое деление.
При оценке частотного анализа необходимо исходить из того, что каждая вращающаяся и осциллирующая деталь машины генерирует колебания преимущественно с ее частотой движения. Причиной этого у роторов в большинстве случаев является дисбаланс, а у осциллирующих деталей – не полностью уравновешенные массовые силы. С помощью определяемого спектра частот и чертежа машины можно определять, какие составляющие колебаний машины принадлежат к отдельным движущимся массам машины, т.е. определяются возбудители колебаний (рисунок 1.20).

Рисунок 1.19 – Колебания электродвигателя
В настоящем примере (рисунок 1.20) частота вращения приводного ремня составляет 10 Гц. При каждом повороте стык ремня возбуждает ременный шкив приводного двигателя и ременный шкив шпинделя к колебаниям, частота которых составляет 10 Гц и 20 Гц (т.е., двойная частота). Составляющая колебаний с максимальной скоростью имеет частоту в 24,9 Гц, которая точно соответствует частоте вращения ременного шкива. Следовательно, можно делать вывод: дисбаланс ременного шкива.
Другие частоты могут вызываться соседним, установленным на том же фундаменте фрезерным станком, дисбалансом строгального инструмента, подшипниками качения и 4-мя находящимися на строгальном инструменте со смещением на 90° друг относительно друга ножами.
При таком спектре частот машины подавление колебаний просто. Сначала определенные составляющие колебаний устраняются на вибровозбудителях, генерирующих колебания с высокой скоростью, так как они оказывают особенно сильное влияние на плавность хода. Следовательно, в данном примере, прежде всего, требуется устранение дисбаланса ременного шкива приводного двигателя и инструмента машины.

Рисунок 1.20 – Результат частотного анализа для строгального станка для дерева
На практике часто есть желание, получить патентный рецепт для надежной идентификации вибровозбудителей. Это, ввиду многообразности машин особенно по конструкции возможно только с определенными ограничениями. Несмотря на это гарантия нахождения каждого вибровозбудителя машины с помощью этих информационных материалов не дается.
В таблицах 1.1 и 1.2 указаны встречаемые чаще всего причины колебаний машин, характерные признаки их опознавания и соответствующие меры для устранения этих колебаний. Для облегчения интерпретации различаются между колебаниями роторов в подшипниках качения (т.е., абсолютными колебаниями подшипников) и колебаниями роторов в подшипниках скольжения (т.е., относительными колебаниями валов).
Первое место среди возбудителей колебаний занимает дисбаланс роторов, который приводит к колебаниям с частотой вращения. Балансировка ротора устраняет эти колебания или, по меньшей мере, снижает их до допустимых значений.
Второе место при этом занимает неправильный монтаж. Под этим выражением следует понимать неточную выверку, заклинивание сцеплений, зазор и биение фланцевых соединений, которые приводят к механическим колебаниям. Эти колебания также могут иметь частоту вращения детали. Кроме того, особенно характерно, что наряду с колебаниями в радиальном направлении также возникают сильные осевые колебания с изменением амплитуды в зависимости от нагрузки и числа оборотов.
Эти колебания устраняются путем выверки вращающихся деталей. При этом проверяются радиальное и осевое биения валов роторов сцеплений, например, с помощью стрелочного индикатора.
Часто колебания возбуждаются и дефектными подшипниками качения, которые создают разные, в большинстве случаев очень высокие частоты колебаний. Такие колебания можно естественно устранять только путем замены дефектных подшипников качения.
Таблица 1.1. Описание колебаний роторов в подшипниках скольжения
| Причины колебаний валов | Временные характеристики максимального отклонения | Зависимость макс отклонения | Характерные частоты в спектре колебаний | Форма кинетической характеристики | Графическое изображение временной функции амплитуды колебаний | Устранение |
| Постоянный дисбаланс | Постоянная | Зависимость от числа оборотов | Частота вращения | Эллипс специальными формами круг и прямая | Синус | Балансировка |
| Термический дисбаланс | Изменяется в зависимости от изменения эксплуатационного состояния (например после разгона), часто достижение установившегося значения | Зависимость от мощности и изменения мощности | Частота вращения | Эллипса со специальными формами круг и прямая | Синус | |
| Дисбаланс вследствие коррозии, эрозии или загрязнения | Медленно изменяется в более длительных интервалах | Зависимость от числа оборотов | Частота вращения | Эллипса со специальными формами круг и прямая | Синус | Замена ротора |
| Дисбаланс вследствие излома частей ротора (например, лопаток) | Внезапное нарастание или падение | Зависимость от числа оборотов | Частота вращения | Эллипса со специальными формами круг и прямая | Синус | Замена ротора |
| Самовозбужденные колебания, напр., из-за эластичного гистерезиса, возбуждение зазором или нестабильность подшипника | Как правило, сильно меняется | Зависимость от числа оборотов, мощности (особенно при возбуждении зазором), от температуры масла подшипника (только при нестабильности подшипника) | Часто частота по порядку равняется низкой собственной частоте изгиба вала с учетом подшипника | Нерегулярная, редко замкнутая кривая | Часто похоже на синус и меняющееся | Изменение характеристик величины подшипника |
| Вынужденные явления (например, неравная выверка или эаклиневшее сцепление) и свободные вкладыши подшипника | Постоянная | Зависимость от числа оборотов и мощности | Частота вращения и ее многократное (особенно двукратное) | Часто замкнутая кривая различной формы (например октаэдр) | Как правило в общем периодическое изображение | Выверка |
| Дефект коробки передач | Постоянная или иногда с периодическими колебаниями | Зависимость от числа оборотов и мощности | Специальная частота коробки передач, одновременно частота вращения ст. привода и выхода | Нерегулярная, в большинстве случаев не замкнутая кривая | Обычно периодическое изображение часто не синус | Контролировать коробку передач |
| Электрические или магнитные помехи электродвигателей и генераторов | Постоянная или иногда с периодическими колебаниями | Как правило, зависимость от мощности | Частота вр. часть сети, двойная ч. сети, часть скольжения двойная ч. скольжения как часть, модуляции | Часто эллипса | Синус или похоже на синус, иногда с амплитудной демодуляцией | Устранение в большинстве случаев невозможно |
| Изменение дисбаланса из-за межвиткового замыкания полюсов или двойного замыкания на землю | Внезапное нарастание или падение | Зависимость от числа оборотов | Частота вращения | Круг, эллипса | Синус | Устранение электрической погрешности |
На машинах с коробками передач вследствие погрешностей зубьев могут возникать так называемые частоты зацепления зубьев, которые рассчитываются из числа оборотов при вращении зубчатого колеса, умноженного на число зубьев. Поэтому рекомендуется контролировать зубчатые колеса коробок передач и при необходимости заменять их.
Глобально электрические, магнитные, гидравлические и пневматические помехи, приводящие к колебаниям – возникновение таких помех сильно зависит от конструкции машины. Указанные помехи обычно устраняются путем изменения конструкции машины.
Особенно следует упоминать и резонансы фундаментов, роторов и конструкций подшипников, хотя они не являются непосредственной причиной возникновения колебаний. Вследствие резонансов, однако, небольшие механические колебания могут усиливаться и достигать значений, которые могут быть опасными для машины. Такое явление наблюдается в том случае, если частота колебаний соответствует резонансной частоте машины. Такое совпадение, например, рабочего числа оборотов машины с резонансном фундамента встречается в некоторых случаях и приводит к опасным эксплуатационным ситуациям. В данном случае эти механические колебания устраняются настройкой соответствующей системы «пружина – масса» машины путем изменения конструкции.
Таблица 1.2 Описание колебаний роторов в подшипниках качения
| Причина | Частота f | Амплитуда | Примечание | Устранение |
| Дисбаланс ротора | f ротора | Как правило постоянная и воспроизводимая амплитуда. Максимальное измеряемое значение в радиальном направлении ротора | Самая частая причина колебаний машин | Балансировка |
| Неправильный Монтаж /неточная выверка, заклинивание сцеплений, зазор и биение фланцевого соединения | f ротора 2 • f ротора может быть и выше | Наряду с радиальными колебаниями в большинстве случаев возникают сильные осевые колебания | Надежным признаком являются сильные колебания в осевом направлении и изменение состояния балансировки в зависимости от нагрузки и числа оборотов | Выверка вращающихся частей. Проверка радиального и осевого биения с помощью стрелочного индикатора |
| Дефектные подшипники качения | Разные, обычно очень высокие частоты | Нет постоянной или, по меньшей мере, нет воспроизводимой индикации | Максимальная амплитуда встречается вблизи дефектного подшипника | Замена подшипников качения |
| Некруглая посадка подшипника, заклиненный подшипник качения | 2 • f ротора отчасти и 3 • f ротора и выше | Сильные радиальные колебания с постоянной амплитудой | Овальная опорная шейка создает, например, колебания с 2 • f ротора | Доработка опорной шейки и вкладыша подшипника |
| Слишком большой зазор в подшипниках качения, ослабленное внутреннее кольцо | f ротора | Невоспроизводимая индикация, т.е. другое измеряемое значение при каждом пуске | Проводить несколькие измерительные пуски и записать результаты (кружок рассеяния) | Замена подшипника качения, проверять допуски на посадку |
| Дефектный приводной ремень | f ремня 2 • f ремня отчасти и выше | Обычно нестабильное показание. Радиальные колебания преобладают. | Колебание ремня можно наблюдать с помощью стробоскопа | Применять новый ремень с постоянным поперечным сечением |
| Дефект коробки передач | Разные, обычно очень высокие частоты, например, z • f ротора (z = число зубьев) | Как правило только низкие амплитуды колебаний | Редко причиняет механические, а часто акустические колебания | Контролировать зубчатые колеса коробки передач |
| Электрические или магнитные помехи | f ротора f синхронно 2 • f синхронно | Постоянная и воспроизводимая индикация малые амплитуды | Возникают только при включенном сетевом напряжении | В большинстве случаев устранение невозможно |
| Гидравлические или пневматические помехи | Разные частоты (в зависимости от числа крыльчаток вентилятора или лопаток насоса) | Обычно нестабильное показание, малые амплитуды | Возбуждают преимущественно конструкции из листового металла к резонансным колебаниям | Устранение возможно только путем изменения конструкции |
| Осциллирующие массы кривошипно-шатунного механизма | f хода 2 • f хода 4 • f хода и т.д. | Как правило, амплитуды уменьшаются в зависимости от порядкового числа | Измерять радиальные колебания в горизонтальном и вертикальном направлениях | Колебания 1-го порядка можно уменьшать, например, путем балансировки. Устранение колебаний более высокого порядка возможно только путем изменения конструкции |
На машинах с осциллирующими массами кроме колебаний с частотой вращения возникают и колебания старшего порядка. Путем балансировки можно только оптимизировать, а не устранять колебания с частотой вращения. На колебания старшего порядка изменения конструкций не повлияют.
В заключение следует, и упоминать соседние машины, которые также могут причинять колебания. Под этим необходимо понимать машины, стоящие на совместном фундаменте и передающие колебания через этот фундамент. Если эти колебания мешают, обязательно необходимо устранять колебания каждой отдельной машины или устанавливать машины на виброизолированные фундаменты.
Перечисленные выше причины возникновения колебаний представляют только часть многочисленных возможных причин. Несмотря на это, однако, учитывая таблицы 1.1 и 1.2 на практике можно интерпретировать уже больше 90% всех колебаний машин. В некоторых случаях рекомендуется дополнить частотный анализ измерением характеристики разгона и выбега машины и рассмотрением кинетической характеристики. В сложных случаях диагноз машины улучшается путем проведения измерений.
Устранение колебаний
В перечне причин колебаний было упомянуто, что дисбаланс является самым частым вибровозбудителем в области машиностроения. Этим затронута одна из повседневных проблем современного машиностроения, решение которой здесь рассматривается в основных чертах, т.е., речь идет о балансировке роторов.
Согласно определению под балансировкой следует понимать процесс, с помощью которого проверяется распределение масс ротора и, в случае необходимости, проводится соответствующая коррекция. Благодаря этому обеспечивается, что колебания опорных шеек с частотой вращения при эксплуатационных оборотах находятся в определенных пределах. Многочисленность конструкций роторов обусловливает также многочисленность методов балансировки. Поэтому, рассматриваем теперь главные методы балансировки с теоретической стороны.
Представим себе тонкую шайбу (рисунок 1.21), которая вырезана из ротора вертикально к оси. Представим себе дальше, что при невращающемся роторе ось стержня проходит через геометрическую середину  этой шайбы. Вследствие неизбежных производственных неточностей центр тяжести
этой шайбы. Вследствие неизбежных производственных неточностей центр тяжести  шайбы обычно находится на расстоянии
шайбы обычно находится на расстоянии  от геометрической середины
от геометрической середины  . Масса
. Масса  шайбы и расстояние
шайбы и расстояние  являются мерой для дисбаланса шайбы. Как только ротор начинает вращаться с угловой скоростью
являются мерой для дисбаланса шайбы. Как только ротор начинает вращаться с угловой скоростью  вокруг оси стержня, которая проходит через , в шайбе получается следующая центробежная сила
вокруг оси стержня, которая проходит через , в шайбе получается следующая центробежная сила  :
:
Данная сила находится под прямым углом к оси стержня.

Рисунок 1.21 – Ротор в виде шайбы
Балансировка такой шайбы проста, так как ротор имеет только одну радиальную плоскость. Следовательно, может образоваться только статический дисбаланс, который можно устранять или, по меньшей мере, уменьшать до допустимого значения с помощью, так называемого метода балансировки в одной плоскости путем добавления или устранения массы ротора.
На практике, в большинстве случаев встречаются роторы с большей осевой протяженностью, как например, цилиндрические роторы, которые можно представлять себе в виде многих отдельных тонких шайб, находящихся в вертикальном относительно оси стержня положении. Для каждой шайбы можно определять дисбаланс, который показывает состояние неуравновешенности данной шайбы. По правилам статистики отдельные дисбалансы всех шайб в конечных плоскостях ротора можно объединять и образовать равнодействующую дисбаланса.
Отдельные дисбалансы (рисунок 1.22)  до
до  на цилиндрическом роторе можно объединять и получать, таким образом, равнодействующие дисбаланса
на цилиндрическом роторе можно объединять и получать, таким образом, равнодействующие дисбаланса  и
и  в конечных плоскостях.
в конечных плоскостях.
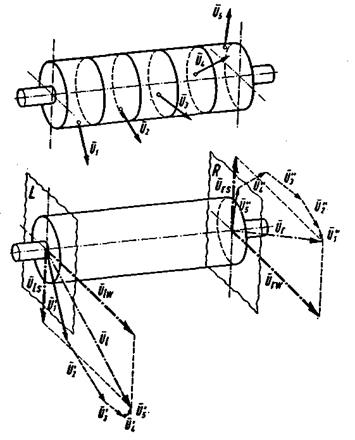
Рисунок 1.22. Дисбалансы цилиндрического ротора
Этим уже описан основной принцип применяемого в настоящее время в большинстве случаев метода балансировки, т.е., метода балансировки в двух плоскостях. В данном случае дисбаланс в двух радиальных плоскостях ротора устраняется путем добавления или снятия массы, причем этот метод обеспечивает компенсацию и динамической и статической составляющих дисбаланса ротора. К сожалению, однако, этот столь важный на практике метод применим только со следующим ограничением: Хороших результатов с методом балансировки в двух плоскостях можно достигать только с жестким балансируемым ротором.
Ротор считается жестким, если его состояние неуравновешенности до достижения эксплуатационной скорости не заметно или изменяется только незначительно. Это значит, что дисбаланс ротора представляет фиксированную величину, которая не связана с определенным числом оборотов, и которую можно устранять при любой скорости в пределах рабочего числа оборотов. К счастью всем, которым приходится заниматься балансировкой, большинство роторов отвечает этому требованию.
Для балансировки жестких роторов можно пользоваться двумя, отвечающими условиям на практике методами:
a) Балансировка на балансировочном станке
b) Балансировка (эксплуатационная балансировка) на месте, причем балансируемая деталь монтирована.
Области применения этих двух методов специфически. Балансировочный станок в представленном на рисунке виде дает технически и экономно правильное решение задач балансировки в производстве. Его габариты, вес и приводная мощность должны отвечать требованиям балансировки определенного ротора. Важно и указать факт, что всегда необходимо приводить ротор к балансировочному станку, и что как правило, можно отбалансировать только отдельный ротор и не комплектную машину. Операция балансировки на балансировочном станке проста, быстра и надежна.
Второй метод называется методом балансировки на месте. В данном случае встроенный ротор отбалансируется как часть комплектной машины, т.е., крыльчатка балансируется непосредственно на вентиляторе для отходящих газов, центрифуга – в центрифуге и шлифовальный круг – на шлифовальном станке. При этом нет необходимости приобретения балансировочного станка, демонтажа и транспортирования ротора.
Используемый для балансировки на месте метод в данном случае рассматривается на примере центрифуги. На рисунке 1.23 и 1.24 показана принципиальная конструкция центрифуги. Здесь речь идет о длинном и жестком роторе, дисбаланс которого следует устранять динамически в двух плоскостях.
Точки измерения = две опорные точки 1 и 2. Устранение дисбаланса осуществляется в конечных плоскостях А1 и А2 ротора путем добавления или снятия массы.

Рисунок 1.23 – Схема конструкции центрифуги
Для определения уравновешивающих масс на обеих опорных точках 1 и 2 измеряются колебания с частотой вращения барабана центрифуги.
Колебания воздуходувки вследствие дисбаланса измеряются на опорной точке 1 и дисбаланс устраняется в плоскости центра тяжести А1.
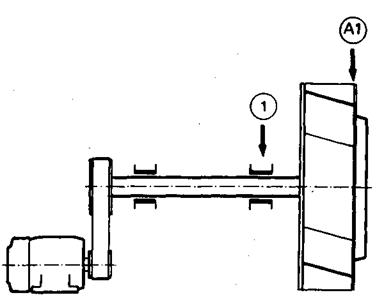
Рисунок 1.24 – Схема конструкции воздуходувки
Для балансировки в одной плоскости в целом требуются три измерительных действия:
Действие 1- с помощью балансировочного прибора измеряются величина и угловое положение колебаний (возникающих вследствие дисбаланса) при рабочей скорости на опорной точке 1 («начальный дисбаланс»).
Действие 2 – в плоскость коррекции А1 ротора устанавливается дисбаланс известной величины («тарировочная масса»). Повторяется измерение величины и углового положения колебаний на опорной точке 1. Определяется и устанавливаются коррекционные массы для ротора.
Действие 3 – производится проверка правильности балансировки. Для этого измерять колебания на опорной точке и сравнивать получаемые значения со значениями допусков.
Балансировка упругих роторов – Кроме рассматриваемых в предыдущей части жестких роторов нам известны и упругие роторы. Упругими называются все роторы, которые являются нежесткими, т.е. состояние дисбаланса которых изменяется в зависимости от числа оборотов.
Среди упругих роторов первостепенная важность придается гибким роторам, так как они часто встречаются в высококачественных роторных системах. Например, турбины, турбогенераторы, турбокомпрессоры и турбонагнетатели обычно являются гибкими.