Пояснение к работе
Рычажно-зубчатые измерительные приборы часто используют для измерения отклонений расположения и формы поверхностей вследствие их относительно малых габаритов и относительно больших диапазов измерения, возможности изменять направление движения измерительного стержня без управляющего воздействия оператора, а также возможности у некоторых из них изменять угол -между осями прибора и его измерительного стержня (индикатор ИРБ), что облегчает измерения в труднодоступных местах.
Определения отклонений расположения и формы поверхностей, их эксплуатационная роль и технологическое происхождение рассматриваются в учебнике [1, стр- 75—79].
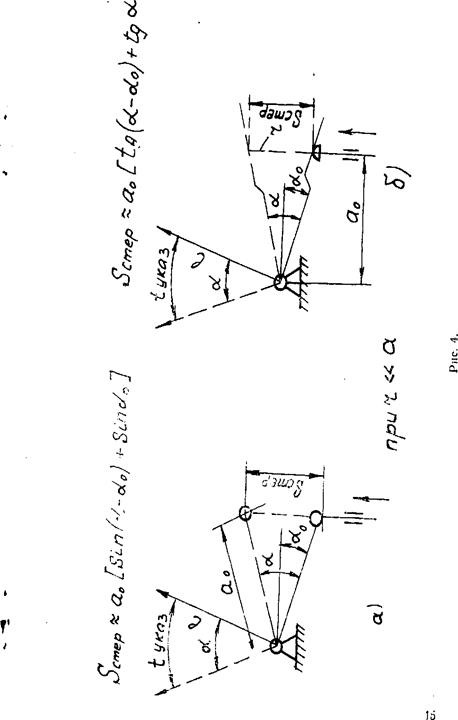
Измерительные цепи рычажно-зубчатых приборов состоят из сочетаний механических рычагов и зубчатых пар. Рычаги в этих приборах по-существу, являются элементами синусного и тангенсного механизмов, принципиальные схемы которых показаны на рис. 4. Синусный механизм, в сущности, получается при плоской поверхности контакта поступательно движущегося элемента, а тангенсный — при сферической его поверхности. Из рис. 4 видно, что при малом радиусе сферического наконечника  по сравнению с плечом
по сравнению с плечом  рычага имеем для синусного механизма
рычага имеем для синусного механизма
 (3)
(3)
и для тангенсного механизма
 (4)
(4)
При малых углах а и ao в обоих случаях имеем с хорошим приближением
 (5)
(5)
Систематическая погрешность при использовании формулы (5) составляет для синусного механизма
 (6)
(6)
и для тангенсного механизма
 (7)
(7)
Иначе говоря, погрешность синусного механизма в 2 раза меньше погрешности тангенсного механизма- К рычажно-зубчатым приборам относятся: рычажная скоба CP(пассаметр)1 рычажно-зубчатые индикаторы ИРБ ГИР5-2 и ИРТ2, многооборотные инднкагорыИГМ и МИГ3, рычажно-зубчатые измерительные головки ИГ и МКМ[1], индикаторные нутромеры[2], рычажно-зубчатые нутромеры [3] н некоторые другие приборы.
РЫЧАЖНАЯ СКОБА CP
Типичным представителем этой разновидности прибороз может служить рычажная скоба СР. принципиальная схема которой показана на рис. 5а. Измеряемое относительным способом изделие помешается между поджатой пружиной 7 подвижной пяткой / и неподвижной при измерениях переставном пяткой 2, которая имеет в правой части винтовую нарезку (на схеме не показана), за счет чего регулируется ее исходное положение при настройке, после этого она стопорится. К правой плоской стенке подвижной пятки прижат конец малого рычага 8 (схема синусного механизма), поворачивающегося вокруг оси шарнира 6. На свободном конце большого плеча 9 того же рычага укреплен зубчатый сектор 8, находящийся в зацеплении с трибом 4, на одной оси с которым жестко посажена стрелка 5, перемещающаяся вдоль шкалы 10, по которой делается отсчет отклонений измеряемого размера от размера блока плиток, по которому настроен прибор. Когда подвижная пятка переместится на 1 сл. длины, то дуговое перемещение
зубчатого сектора в соответствии с (5) составит 1  длины, где R и r — длины соответственно большого и малого плеча рычага. Это составляет
длины, где R и r — длины соответственно большого и малого плеча рычага. Это составляет  шага, где t — шаг зацепления зубчатого сектора с трибом. При этом угол поворота триба в радианах составит
шага, где t — шаг зацепления зубчатого сектора с трибом. При этом угол поворота триба в радианах составит  , где zT — число зубьев триба, а дуговое перемещение стрелки будет
, где zT — число зубьев триба, а дуговое перемещение стрелки будет  , где l —длина стрелки. Окончательно передаточное отношение будет иметь вид
, где l —длина стрелки. Окончательно передаточное отношение будет иметь вид
 (8)
(8)
где m — модуль зацепления зубчатого сектора с трибом; rд — радиус делительной окружности триба.
Рычажные скобы имеют следующие размеры элементов измерительной цепи R=42 мм,  мм (регулируется при юстировке) l =30 мм, m= 0,15 мм и zT =11, поэтому по формуле (8) имеем
мм (регулируется при юстировке) l =30 мм, m= 0,15 мм и zT =11, поэтому по формуле (8) имеем  .
.
Цена деления шкалы j=2 мкм и длина (интервал) деления шкалы  мм, что дает
мм, что дает  , т. е. получается
, т. е. получается
совпадение результатов, подтверждающее правильность выкладок. Предельная погрешность показаний прибора по норме составляет  , диапазон показаний ±40 деталей, а норма на измерительное усилие [G] = 7±2H.
, диапазон показаний ±40 деталей, а норма на измерительное усилие [G] = 7±2H.

1 ГОСТ 11098-64.
2 ГОСТ 5584-61 и ГОСТ 16924-71.
3 ГОСТ 9696-61.
4 ГОСТ 18АЗЗ-73.
5ГОСТ 868-72.
6 ГОСТ 9244-59.