Навигационный комплекс БНК-2 типа «Пижма-1», установленный на Ил-86, предназначен для выполнения автоматизированного полета по заданному или выбранному в полете маршруту от взлета до посадки при сокращенном составе экипажа, без штурмана на борту ВС. Ввод программы полета производится на земле перед вылетом, но возможно его оперативное, изменение в полете. В ПНК в качестве информационной применена географическая система координат, счисление пути ведется в частноортодромической системе. Моделирование опорного истинного меридиана аэродрома вылета и магнитного аэродрома посадки осуществляется базовой системой курса и вертикали БСКВ.
Исходные данные для автоматического расчета в БЦВМ пространственно-временной программы полета можно вводить с помощью перфокарт или с наборного поля ПВИ. Исходными данными являются: географические координаты ППМ (до 50), аэродромов (до 8) и радиомаяков (до 9); заданное время полета по маршруту; параметры схем БПМ аэродромов посадки ПМПУ, L, S2 и S4; номера каналов РСБН типа «Радикал». Автоматически ПНК осуществляет: расчет элементов пространственно-временной программы полета; непрерывное счисление пути и расчет азимутальных поправок; выработку управляющих сигналов в САУ для выдерживания ЛЗП и выполнения полета; коррекцию координат МС и ортодромического курса, включение в работу и выключение РНС «Радикал»; предпосадочное маневрирование в районе аэродрома посадки; выдачу на индикацию навигационной информации и подсказок.
Навигационный комплекс работает в режимах полета по маршруту и в районе аэродрома радиусом 100 км. Возможны оперативное изменение маршрута полета и полет по параллельной ЛЗП, смещенной на заданное число километров, с полуавтоматическим выводом ВС на ЛЗП. В ПНК предусмотрены курсодоплеровский и курсовоздушный
 рис.26.7
рис.26.7
(аэрометрический) виды счисления. Загруженность экипажа работой с ПНК в полете составляет 40-30 % полетного времени. Точность счисления пути характеризуется Ксч = 0,009. Повышение точности и надежности навигации достигается резервированием основных каналов навигационной информации с использованием трех независимых каналов и ее обработкой для получения среднего значения измеряемого параметра.
Состав ПНК. Навигационный комплекс «Пижма-1» основан на работе бортовой цифровой машины типа «Орбита-20-86» и системы траекторного управления типа САУ-1т-2-86. В качестве датчиков навигационной информации используются следующие:
позиционной — радионавигационные системы ближней навигации «Радикал» (2 комплекта), КУРС-МП-70 (2 комплекта), самолетный дальномер СД-75 (2 комплекта) и бортовой радиолокатор «Гроза-86»;
курсовой — базовая система курса и вертикали БСКВ, включающая в себя 3 комплекта инерциальных курсовертиклей ИКВ-72 и 2 комплекта индукционных датчиков ИД-6;
элементов движения ВС — доплеровский измеритель скорости и угла сноса «Снос» («Горизонт»), информационный комплекс высотно-скоростных параметров ИК ВСП.
Индикация навигационных параметров и команд осуществляется с помощью командных приборов ПКП-72, ПНП-72, пультов ввода и индикации ПВИ-2, индикатора навигационной обстановки ИНО-2 и системы автоматических сигналов САС, выдающей 10 видов подсказок экипажу.
Функциональные связи в ПНК «Пижма-1». Бортовая вычислительная машина координирует всю работу ПНК. Функциональные связи ее с датчиками навигационной информации (рис. 26.7) обеспечивают ввод и получение необходимой информации для осуществления автоматизированного вождения ВС по ЛЗП. Для счисления пути используются осредненные данные курса, скорости и высоты, предварительно проверенные на достоверность по выбросам относительно среднего значения. Основным источником курсовой информации в ПНК является БСКВ  рис.26.8
рис.26.8
сопряженная с ЦВМ. Для счисления пути используется приведенный (ортодромический) курс, отсчитываемый: при полете по маршруту от истинного меридиана начального ППМ каждого участка пути; при полете в районе аэродрома в R = 100 км от магнитного меридиана КТА.
При формировании приведенного курса по любому из трех каналов автоматически учитываются широтная поправка, угол схождения меридианов, поправка в курс, вводимая в процессе начальной выставки или коррекции курса в полете.
В процессе работы ПНК может находиться в двух состояниях:
оценивания — выполнения коррекции при нахождении ВС в пределах рабочей области РМ, в процессе которого оценивается достоверность информации от РСБН, вводятся поправки к счисленным координатам, путевой скорости и фактическому путевому углу;
прогнозирования — автономный полет вне рабочей области РМ, в процессе которого производится оценка нахождения ВС в пределах установленной трассы и формируется сигнал «Произведи коррекцию».
Коррекция счисленного МС выполняется автоматически от РСБН и полуавтоматически с помощью других средств. Перед выполнением автоматической коррекции на индикатор ПВИ выдается значение рассогласования координат счисленных и измеренных. Решение на выполнение коррекции принимает экипаж. Коррекция (выставка) гироскопического курса может производиться автоматически по данным РСБН, при рулении и взлете по известным значениям азимутов РД или оси ВПП и полуавтоматически по магнитным датчикам и по заданному курсу вручную.
В ЦВМ предусмотрен автоконтроль работы ПНК решением запрограммированных тестов и выполнением имитации полета. Система САС выдает в нужный момент подсказки экипажу о тех или иных действиях.
Органы управления ПНК «Пижма-1». Комплект ПНК включает в себя пульты управления и индикаторы навигационной информации.
Пульт подготовки и контроля ППК (рис. 26.8) предназначен для ввода исходных данных программы полета с перфокарт в память ЦВМ, включения режима контроля пультов НК, сигнализации исправности и готовности ЦВМ и всего комплекса. Режим «Готовность НК» соответствует исправности систем ЦВМ, БСКВ, ИК ВСП, переводу ИКВ в режим «Работа», исправности ДИСС, РСБН и СД, наличию введенного начального курса ВС.
Пульт ввода и индикации ПВИ-2 (рис. 26.9) предназначен для управления рабочими режимами НК, для ввода и индикации навигационных параметров.
Органами индикации и управления являются:
индикаторное поле, включающее двухразрядный индикатор ППМ, два семиразрядных индикатора значений вводимых или вызываемых на индикацию навигационных параметров с кнопками «Сброс», двухразрядный индикатор кодов адресов точек ППМ, АЭР, РМ, РДС и отдельных задач;
13 кнопок-табло наборного поля навигационных параметров; кнопки наборного поля чисел: 0,1... 9, с признаками параметров и кнопкой-табло «Испол.»;
 рис.26.9
рис.26.9
панель управления с переключателем «Работа», режимными кнопками-табло: «Счисл.», «Парал. марш.», «РСБН», «КУРС» и кнопкой «Кратч. расст.».
Пульт взлета и посадки ПВП (рис. 8,10) предназначен для автоматизации управления полетом ВС при выполнении предпосадочного маневра.
Оперативными органами ПВП являются:
схема прямоугольного маршрута с кнопками-табло, соответствующими точками 2, 3, 4-го разворотов БПМ, ДПРМ, его траверза;
переключатели направления курса взлета или посадки «Нап-равл. ВПП», направления аэродромного круга полетов «Круг лев. — прав.»
кнопка «Разв.» для начала принудительного разворота от текущего МС на следующий участок маневра, параллельный запрограммированному;
переключатели для программирования точек предпосадочного маневра.
Пульт управления ПУ-41 предназначен для управления режимами работы БСКВ,
автоматической или ручной установкой широты МС, а также включением режима «ЗК» с установкой заданного курса и тест-контролем.
Пульт управления ПУ-2П служит для управления коммутацией индуцируемой информации на ПНП-72 в соответствии с положением переключателя на пульте режимов САУ кнопками-табло «ЦВМ», «VOR», «ЗПУ», «Заход». f Индикатор навигационной обстановки ИНО-2м (рис. 26.12), представляющий собой оптико-электромеханический прибор, обеспечивает
наглядную индикацию перемещений ВС относительно земной поверхности.

Рис.26.10
Полоса земной поверхности вдоль маршрута с помощью микрофильма в масштабе 1:2 000 000 в режиме «Маршрут» и 1:500 000 в режиме «Аэродром» проецируется на экране индикатора. Изображение имеет продольное и боковое перемещение относительно центрального маркера, имитирующее движение ВС. Индикатор имеет приспособление для измерения расстояний и истинных пеленгов ориентиров по экрану.
Плановый навигационный прибор ПНП-72 (рис. 26.13) предназначен для контроля положения ВС относительно ЛЗП в горизонтальной плоскости, стран света, а также радиомаяков при полете по маршруту и заходе на посадку. Индикация строится на принципе «вид с самолета на землю».
На индикацию выдаются: текущий и заданный курсы, фактический путевой угол, отклонение от ЛЗП или равносигнальной зоны курсового РМ,
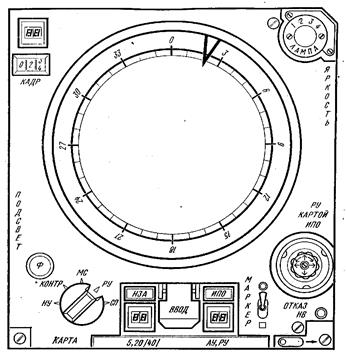 рис.26.12
рис.26.12
 рис. 26.13
рис. 26.13
отклонение от равносигнальной зоны глиссадного радиомаяка, направление полета «на» или «от» радиостанции, цифровые значения дальности до ППМ и значения ЗПУ или ПМПУ, текущий угол сноса, бленкеры сигнализации отказов курсового и глиссадного РМ, датчика и канала текущего курса счетчиков ЗПУ и дальности.