Аппаратура
При проведении работ использовался электроискровой источник упругих волн типа «Спаркер».
Источник типа «Спаркер» использует электрическую энергию для ее преобразования в акустическую. Данный источник упругих волн открывает широкие возможности для варьирования параметров упругих волн либо путем изменения запасенной в накопителе энергии, либо путем изменения числа излучающих электродов. Принцип действия указанного источника основан на преобразовании электрической энергии в акустическую, при нагревании жидкости протекающим через нее электрическим током. В жидкости возбуждение упругих волн обычно наблюдается при электрическом пробое между двумя электродами после «быстрого» приложения «достаточно высокого» напряжения от «достаточно» мощного источника. Выделяющееся тепло приводит к нагреву, испарению и частичному разложению жидкости и к возникновению парогазовой области с большим внутренним давлением. Последующее движение стенок этой каверны приводит к возникновению в окружающем пространстве интенсивной волны сжатия с максимальным давлением на фронте волны того же порядка, что и внутреннее давление в каверне (Калинин, Пивоваров).
При проведении работ в качестве «Спаркера» использовался оголенный жильный провод длиной 1,5 метра, с вбитыми в него 80 гвоздями по спирали с углом наклона 90 градусов (Рисунок 17). Расстояние между гвоздями составляло 1 см. Центральная частота источника типа «Спаркер», при заглублении в 1 метр, составляла около 900 Гц. Полоса частот полезного сигнала от 200 до 4000 Гц (Рисунок 18)
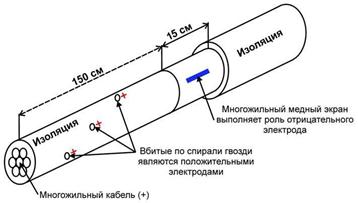
Рисунок 17: Схема спаркера (Рисунок С. Доронин)
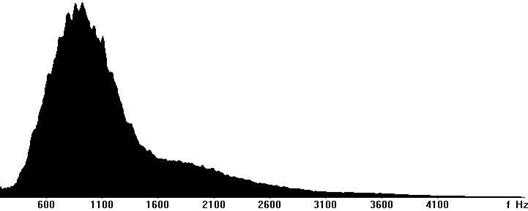
Рисунок 18: Спектр сигнала спаркера
Энергия на источник подавалась с помощью установки «Этап-2», состоящей из блока управления, трансформатора и конденсаторов емкостью 40 мкФ. Рабочее напряжение – около 2 кВ. Рабочая мощность около 100 Дж. (Рисунок 19)
В качестве регистрирующей группы при проведении работ использовалась сейсмическая пьезокоса. Пьезокоса состоит из 16 пьезодатчиков типа SQ-05 производства компании Sensor Technology (Таблица 2). Каждый датчик представляет собой отдельный канал регистрации. Датчики расположены на расстоянии 2 метра друг от друга. Таким образом, активная длина косы составляет порядка 30 метров.

| |
| Чувствительность (В/бар при 20˚С) | 6.3 |
| Чувствительность (дБВ исх. 1 мкПа при 20˚С) | -204.5 |
| Ёмкость (нФ при 20˚С) | 4.7 |
| Рабочий диапазон частот | От 1 Гц до 15 кГц |
| Максимальная рабочая глубина (м) | |
| Длина (см) | 4,57 |
| Диаметр (см) | 1,23 |
| Вес (г) | 15,0 |
Таблица 2: Внешний вид и характеристики пьезоприемников
 Рисунок 19: Внешний вид блоков высокого напряжения
Рисунок 19: Внешний вид блоков высокого напряжения
|  Рисунок 20: Внешний вид пьезокосы и буксировочного кабеля
Рисунок 20: Внешний вид пьезокосы и буксировочного кабеля
|
Пьезодатчики заключены в полиуретановый армированный шланг (Рисунок 20). Главным свойством этого шланга является его способность не утрачивать свою эластичность при низких температурах. Малый поперечный размер шланга позволяет сделать пьезокосу достаточно легкой и при этом добиться малых шумов обтекания, а также уменьшить тяговое усилие, что позволит уменьшить требования к нагрузочной способности буксировочного фала. Наполнителем косы является непроводящая жидкость, в качестве которой использовался жидкий парафин. Для обеспечения нейтральной плавучести внутри шланга располагаются вставки из пенопласта. Для буксировки пьезокосы использовался специальный буксировочный фал.
Цифровая регистрация осуществлялась на основе многоканального устройства сбора данных Е-440 USB (Рисунок 21) и программы сбора, разработанной В.Г. Гайнановым. Данный модуль АЦП компактен, имеет достаточные временные и динамические параметры регистрации многоканальных широкополосных сигналов, позволяет программно управлять параметрами регистрации через USB- порт персонального компьютера. Технические характеристики АЦП представлены в (Таблица 3).

Рисунок 21: Внешний вид АЦП L-Card E440
| Количество каналов | 16 дифференциальных или 32 с общей "землей" |
| Разрядность АЦП | 14 бит |
| Эффективная разрядность | 13,3 бит (400 кГц, диап. изм. 2,5 В.) |
| Входное сопротивление (при одноканальном вводе) | не менее 1 МОм |
| Диапазон входного сигнала | ± 10 В; ± 2,5 В; ± 0,625 В; ± 0,15625 В |
| Максимальная частота преобразования | 400 кГц |
Таблица 3: Технические характеристики АЦП L-Card E440
Сигнал от АЦП поступал на персональный портативный компьютер, в котором осуществлялось хранение и первичная обработка получаемых данных.
Навигация осуществлялась при помощи GPS-приемника Garmin Legend HCx. Данные обрабатывались в реальном времени при помощи программы MaxSea, которая использовалась для прокладки сейсмических профилей и навигации в процессе работ. Также навигационные данные были доступны программе регистрации сейсмоакустического комплекса. При этом фактические координаты пунктов возбуждения записывались в заголовки сейсмических трасс, а также сохранялись на жестком диске. (Рисунок 22)
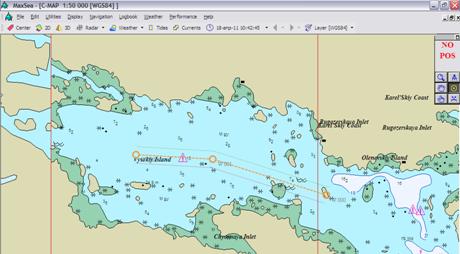
Рисунок 22: Окно программы навигации
Сейсмоакустический комплекс, использовавшийся при проведении работ, представлен на рисунке (Рисунке 23).
Рисунок 23: Сейсмоакустический комплекс
Методика
Сейсмические данные, использованные в работе, были получены с оптимально-заглубленной расстановкой. Исходя из центральной частоты спаркера в 900 Гц, скорости звука в воде 1500 м/с, теоретическое заглубление, равное четверти длины волны, должно составлять около 40 см.
С целью уменьшения влияния кильватерной струи, пьезокоса была вынесена вбок на два метра по левому борту. На буксировочном фале были закреплены утяжелители, массой около 10 кг. Это позволило заглубить косу на расстояние около 1 метра. Дальние каналы во время движения судна всплывали на поверхность, что повлияло на качество регистрируемых данных. Источник был помещен на расстоянии одного метра по левому борту судна, по середине между 1 и 2 каналами. (Рисунок 24, 25)
Рисунок 24: Геометрия наблюдений (в плане)
Рисунок 25: Геометрия наблюдений (вид сбоку)
При выборе методики съемки было определено, что расстояние между пунктами возбуждения должно составлять около 2 метров. Во время проведения работ было невозможно обеспечить постоянную скорость движения судна относительно грунта из-за наличия сильных приливно-отливных течений, волнения моря и т.п. Период возбуждения составлял 1 секунду. Скорость движения судна менялась от 3 до 4 узлов. В зависимости от курса судна, на него по разному действовали течения. Так, в начале работ была минимальная вода и течения были невелики. К окончанию работ начался прилив, усиливший течения в проливе (Рисунок 26). В связи с малыми колебаниями уровня моря, поправки за приливы не вводились. Таким образом, интервал между пунктами возбуждения составлял от 0,9 до 2,2 метров (Рисунок 27).
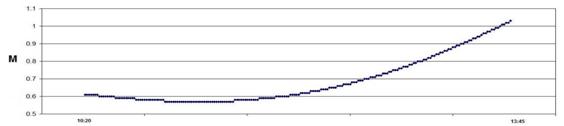
Рисунок 26: График приливов во время проведения работ
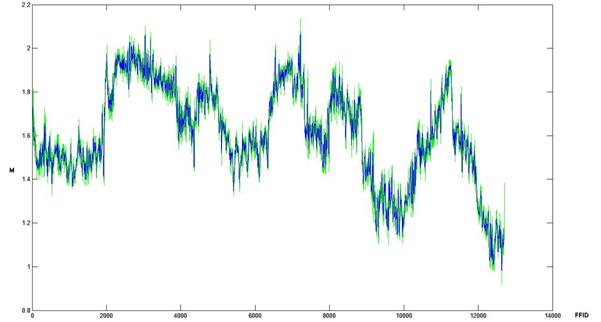
Рисунок 27: Расстояние между пунктами возбуждения
Запись велась в формате SEG-Y (rev. 0). При этом параметры записи были следующими:
· -Период возбуждения - 1 секунда;
· -Количество точек на трассу – 4000;
· -Формат записи – I2;
· -Шаг дискретизации 0.05 мс;
· -Фильтр высоких частот – 4000 Гц;
· -Фильтр низких частот – 60 Гц;
· -Усиление – линейное по всей длине трассы.
Всего во время проведения работ было произведено около 12000 возбуждений и регистрации сигнала.
Обработка
Обработка производилась в программе RadExPro Plus Advanced 2011
Из всего объема обработанных сейсмоакустических данных для детальной обработки и последующего анализа был выбран один профиль. По Профилю 1 судно двигалось с запада на восток со скоростью от 1,8 до 2 метров в секунду. (Рисунок 28).
Рисунок 28: Карта расположения Профиля 1 и распределения скоростей движения судна
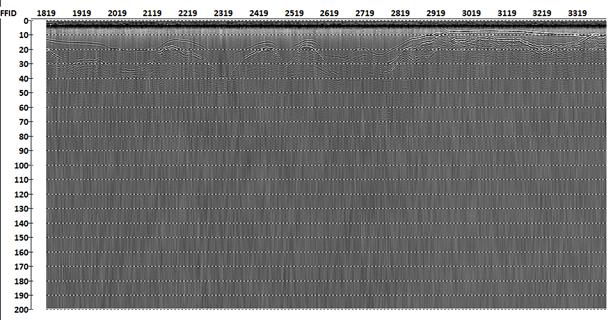
Рисунок 29: Исходные данные по Профилю 1