Лабораторная работа № 1
СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ
ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Целью работы являются:
1. Исследование статических и динамических характеристик замкнутой маломощной системы регулирования скорости вращения двигателя постоянного тока при возможных изменениях коэффициента передачи и других параметров.
2. Расчет и практическая реализация корректирующих устройств.
3. Сравнение результатов расчета и эксперимента, в том числе с аналогичными результатами, полученными при проведении работы № 2.
Общие указания
В решении задач автоматизации технологических процессов важное место занимают проблемы регулирования скорости перемещения объектов. Существуют различные принципы организации систем регулирования скорости. В данной лабораторной работе предлагается исследовать одноконтурную систему регулирования скорости двигателя постоянного тока независимого возбуждения. Структурная и принципиальная схемы исследуемой системы представлены на рис. 1.1 и 1.2 соответственно.
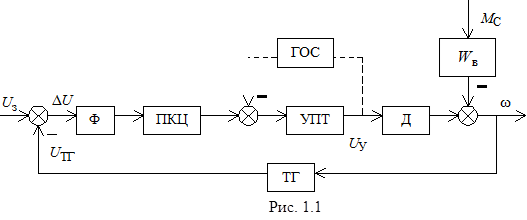 |

В работе предлагается рассчитать, реализовать и провести экспериментальное исследование системы регулирования скорости вращения двигателя в двух вариантах: с последовательной корректирующей цепью (ПКЦ) и с использованием гибкой обратной связи (ГОС). Статические и динамические показатели качества системы регулирования во многом определяются значением коэффициента передачи разомкнутой системы. Из представленной на рис. 1.2 принципиальной схемы видно, что единственным звеном, коэффициент передачи которого можно изменять, является усилитель постоянного тока (УПТ).
При заданных значении установившейся ошибки регулирования и диапазоне регулирования скорости необходимый коэффициент передачи разомкнутой системы определяется по формуле
 , (1.1)
, (1.1)
где  - относительная ошибка в системе без регулятора, т.е. отношение естественного перепада скорости двигателя Δωс при номинальном моменте сопротивления нагрузки на валу двигателя М Д = М С к скорости идеального холостого хода ω0, %, при ω0 = ωmin;
- относительная ошибка в системе без регулятора, т.е. отношение естественного перепада скорости двигателя Δωс при номинальном моменте сопротивления нагрузки на валу двигателя М Д = М С к скорости идеального холостого хода ω0, %, при ω0 = ωmin;  - ошибка регулирования, выражающая отношение абсолютного значения ошибки в системе регулирования Δωр при М Д = М С к скорости идеального холостого хода ω0, %, при ω0 = ωmax;
- ошибка регулирования, выражающая отношение абсолютного значения ошибки в системе регулирования Δωр при М Д = М С к скорости идеального холостого хода ω0, %, при ω0 = ωmax;  - коэффициент передачи разомкнутой системы (k У - коэффициент передачи усилителя УПТ; k Д - коэффициент передачи двигателя Д; k ТГ - коэффициент передачи тахогенератора ТГ).
- коэффициент передачи разомкнутой системы (k У - коэффициент передачи усилителя УПТ; k Д - коэффициент передачи двигателя Д; k ТГ - коэффициент передачи тахогенератора ТГ).
При выполнении лабораторной работы № 1 по курсу "Элементы и устройства автоматических систем", в которой использовался этот же стенд, были изучены элементы данной структурной схемы и в результате анализа снятых статических и динамических характеристик и необходимых расчетов были определены Δωс, k Д, k ТГ, T ЭМ, диапазон изменения k У. Параметр, требующий более тонкого эксперимента, указан на лицевой панели макета (T У). Элементы рассматриваемой системы регулирования скорости хорошо известны и имеют следующие передаточные функции:
 - передаточная функция двигателя по управляющему воздействию;
- передаточная функция двигателя по управляющему воздействию;
 - передаточная функция двигателя по возмущающему воздействию;
- передаточная функция двигателя по возмущающему воздействию;
 - передаточная функция усилителя;
- передаточная функция усилителя;
 - передаточная функция тахогенератора;
- передаточная функция тахогенератора;
 - передаточная функция фильтра, используемого для сглаживания коллекторных пульсаций ТГ.
- передаточная функция фильтра, используемого для сглаживания коллекторных пульсаций ТГ.
Реализация замкнутой системы требует расчета коррекции. Расчет корректирующих устройств (ПКЦ и ГОС) можно производить вручную, используя, например, ЛАЧХ, или с помощью ПЭВМ. И в том и в другом случае необходимо стремиться к тому, чтобы при хороших динамических показателях качества системы конфигурация корректирующих цепей и их параметры соответствовали возможностям их реализации на лабораторном стенде. После проведения расчета следует реализовать систему регулирования, определить ее статические и динамические показатели качества и сравнить их с расчетными. При известных параметрах системы ошибка регулирования по возмущающему воздействию может быть рассчитана из (1.1)
 . (1.2)
. (1.2)
Для определения качественных показателей системы по управляющему воздействию на стенде имеется тумблер К1. Возмущающее воздействие на систему подается с помощью тумблера К2 "ВКЛЮЧЕНИЕ МУФТЫ" и регулируется потенциометром "МОМЕНТ СОПРОТИВЛЕНИЯ".
Порядок выполнения работы
1. Ознакомиться с общими указаниями к выполнению данной лабораторной работы. Вариант задания получить у преподавателя заранее, во время завершения предыдущей работы.
2. Ознакомиться с расположением элементов системы и органов управления на лицевой панели макета и их назначением.
3. Рассчитать параметры ПКЦ для выполнения полученного варианта работы.
4. Перед включением тумблера "СЕТЬ" установить потенциометр задающего напряжения U з в положение "0" (при этом тумблер К1 должен быть в верхнем положении 2), коэффициент усиления усилителя в положение "10", момент сопротивления - "0", т. е. тумблер включения муфты К2 установлен в положение "ВЫКЛЮЧЕНО".
5. Собрать схему регулирования скорости без корректирующих устройств. Фильтр с заданным значением Т Ф должен быть включен в схему. Измерительный прибор U ТГ необходимо подключить к тахогенератору. Включить тумблер "СЕТЬ", убедиться в правильности включения обратной связи по скорости. Увеличивая коэффициент передачи усилителя, определить значение критического коэффициента передачи системы. Выключить тумблер "СЕТЬ".
6. В соответствии с принципиальной схемой ввести в систему ПКЦ. Установить параметры корректирующей цепи в соответствии с расчетами предыдущего п. 3, выставить заданное значение k У, включить тумблер "СЕТЬ".
7. С помощью задающего потенциометра RД установить максимальное значение напряжения на выходе усилителя U У = 20 В, соответствующее максимальному значению регулируемой скорости двигателя ωmax. Рассчитать значение ωmax и определить ее экспериментально, используя измерительные приборы. Эксперименты проводить для двух заданных значений k У.
8. Подключить к дополнительным клеммам тахогенератора осциллограф и по кривой переходного процесса, наблюдаемого на экране осциллографа, определить время регулирования t р и максимальное перерегулирование σmax% исследуемой системы, при ступенчатом изменении задающего напряжения Δ U З (тумблером К1).
9. При значении U У = 20 В включить муфту тумблером К2 и установить потенциометром "МОМЕНТ СОПРОТИВЛЕНИЯ" ток якоря двигателя I Я = 1.5 А. Включая и выключая муфту (К2) зарисовать переходный процесс ω(t) с экрана осциллографа при сбросе и набросе нагрузки, определив при этом значение установившейся ошибки Δωр от возмущающего воздействия:  , а U У - напряжение на выходе УПТ на холостом ходу двигателя, U ТГс - напряжение тахогенератора при I Я = 1.5 А. Подключив вольтметр к выходу элемента сравнения и измерив Δ U, определить суммарную ошибку системы регулирования скорости
, а U У - напряжение на выходе УПТ на холостом ходу двигателя, U ТГс - напряжение тахогенератора при I Я = 1.5 А. Подключив вольтметр к выходу элемента сравнения и измерив Δ U, определить суммарную ошибку системы регулирования скорости  .
.
10. С помощью задающего потенциометра R Д установить минимальное значение напряжения на выходе усилителя U У = 5 В, соответствующее минимальному значению регулируемой скорости двигателя ωmin и при данном значении скорости повторить эксперименты по пп. 8 и 9.
11. Рассчитать параметры ГОС и включить ее вместо ПКЦ.
12. Повторить все эксперименты исследования системы регулирования скорости в соответствии с пп. 7–10.
Оформление отчета
Результаты выполненной работы должны быть представлены в виде отчета, содержащего:
1. Структурную схему системы регулирования скорости.
2. Принципиальную схему макета установки.
3. Расчет параметров корректирующих цепей (ПКЦ и ГОС).
4. Расчет установившихся ошибок по возмущающему воздействию в процентах к естественному перепаду скорости двигателя Δωс и в процентах к регулируемому значению скорости вращения двигателя в соответствии с (1.2) относительно ωmax и ωmin.
5. Результаты моделирования систем с ПКЦ и ГОС (приводятся при машинном расчете системы), т. е. зависимость ω(t) для управляющего и возмущающего воздействий.
6. Результаты экспериментального исследования систем регулирования с ПКЦ и ГОС при задании ωmax и ωmin.
7. По данным экспериментов для всех случаев необходимо определить t р, σmax%, а также значения установившихся ошибок от возмущающего воздействия Δωр и суммарную ошибку регулирования Δω: их абсолютные значения, а также в процентах к естественному перепаду скорости двигателя Δωс и значениям регулируемых скоростей ωmax и ωmin в процентах.
8. Сравнение по всем вариантам исследования расчетных и экспериментальных данных, для чего полученные результаты необходимо представить в виде сводной таблицы.
| Показатель качества системы регулирования | Система с ПКЦ | Система с ГОС | ||||
| Расчет или моделирование | Обработка данных эксперимента | Расчет или моделирование | Обработка данных эксперимента | |||
| ω0 = ωmax | ω0 = ωmin | ω0 = ωmax | ω0 = ωmin | |||
| Δωр, рад/с | ||||||
| Δωр/Δωс, % | ||||||
| Δωр/ω0, % | ||||||
| Δр, % | Расчет по формуле (1.2) при заданных параметрах | |||||
| t р,c | ||||||
| σmах % |
9. Выводы по работе.
Лабораторная работа № 2