Несинхронные принудительные ТС строят на базе различных видов конвейеров.
В машиностроении распространены ленточные и цепные конвейеры. Грузонесущим и тяговым органом для перемещения заготовок в таких конвейерах служит лента (обычно металлическая) или втулочно-роликовая цепь, которые натянуты на барабаны или звездочки, смонтированные в корпусе. Для предотвращения их провисания предусмотрены направляющие планки. Такие конвейеры применяют для относительно легких заготовок, допускающих изнашивание поверхности из-за проскальзывания ленты (цепи) под заготовками. Кроме того, конвейеры с металлической лентой используют для транспортирования стружки. Роликовые конвейеры состоят из роликов, укрепленных на осях в корпусе. Роликам сообщается вращение от привода через замкнутую цепь и звездочки, закрепленные на осях роликов. Перемещение заготовок или приспособлений-спутников происходит под действием сил трения, возникающих между образующей роликов и заготовками, что позволяет подавать их с подпором. Ролики посажены на оси с небольшим натягом через фрикционные втулки, запрессованные в ролики, что позволяет им проскальзывать в момент нахождения под остановленными заготовками.
3.3 Промышленные роботы в автоматизированном производстве [ Шишмарев]
Промышленные роботом принято считать манипулятор, выполняющий физические функции человека в производственных условиях, оснащены системой управления, информации.
По сравнению с другими средствами автоматизации ПР является универсальными и наиболее эффективно применяются в гибком автоматизированном производстве, т.к. обладают свойством быстрой переналадки к меняющимся условиям производства.
Существует три поколения промышленных роботов, характеризуемых уровнем организации системы управления.
ПР первого поколения работают по жёсткой программе, составленной оператором для конкретных условий техпроцесса.
ПР второго поколения могут самостоятельно адаптироваться к изменениям внешней среды, т.е. обладают свойством самоорганизации.
ПР третьего поколения обладают свойствами искусственного интеллекта.
ПР в настоящее время применяются для выполнения основных технологических операций и вспомогательных операций.
Возможность использования ПР в конкретных техпроцессах определяется его технологическими или эксплутационными характеристиками- паспортными характеристиками:
· грузоподъёмностью;
· степенью подвижности;
· величинами перемещений;
· скоростями перемещения каждой степени подвижности;
· погрешностью позиционирования;
· формой рабочей зоны;
· системой координат в которой работает робот.
Роботы можно классифицировать по самым различным признакам. Наиболее общими и содержательными являются классификации по назначению, решаемому классу задач и особенностям управления. Поскольку с развитием робототехники неизбежно формирование новых поколений роботов и внедрение их в новые области и сферы, классификация по назначению и решаемому классу задач не является завершенной и, в известной мере, характеризует путь развития роботов, а поэтому может быть названа эволюционной. По назначению и решаемому классу задач роботы всех поколений могут быть разделены на две большие группы: промышленные и исследовательские (рис. 3.1).
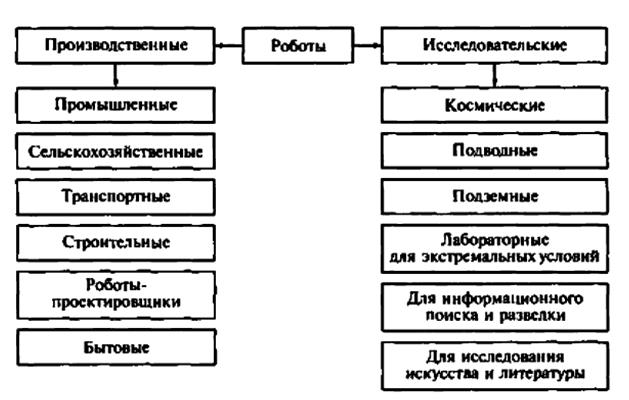
Рис. 3.1 Классификация промышленных роботов
Промышленные роботы (ПР) – это роботы, предназначенные для выполнения тяжелой, монотонной, вредной и опасной для здоровья физической работы, а также для выполнения отдельных видов трудоемкой, напряженной и утомительной умственной работы (проектирование, информационное обеспечение, управление). Соответственно конкретным областям применения существует ряд разновидностей промышленных роботов. Промышленные роботы, получившие наибольшее развитие в настоящее время, предназначены для автоматизации основных и вспомогательных операций в различных отраслях промышленности: в машиностроении и приборостроении, в горнодобывающей, нефтехимической металлургической, атомной и др.
Промышленные роботы, в свою очередь, подразделяются на три группы по производственно-технологическим признакам:
· производственные, или технологические (ППР), для основных операций технологических процессов;
· подъемно-транспортные, или вспомогательные (ПТПР), выполняющие действия типа взять – перенести – положить;
· универсальные (УПР) для различных операций – основных и вспомогательных.
По специализации ПР подразделяются на:
· специальные, выполняющие строго определенные технологические операции или обслуживающие конкретные модели технологического оборудования;
· специализированные, или целевые, предназначенные для выполнения технологических операций одного вила (сварки, сборки, окраски и т.п.) или обслуживания определенной группы моделей технологического оборудования, объединенных общностью манипуляционных действий;
· универсальные, или многоцелевые ориентированные на выполнение как основных, так и вспомогательных технологических операций различных видов и с различными группами моделей технологического оборудования.
Исследовательские роботы (ИР) – это роботы, предназначенные для поиска, сбора, переработки и передачи информации, обследуемых объектах. Такими объектами могут быть труднодоступные или недоступные для человека сферы (космическое пространство, океанские глубины, недра Земли, экстремальные лабораторные условия) либо области, где требуются выявление, переработка и анализ огромной по объему информации, например информационный поиск и разведка, искусство и литература. Примером современных исследовательских роботов служат автоматические аппараты для исследования космоса и планет.