Задачи, решаемые с помощью бортовой РЛС.
Одним из эффективных средств самолетовождения и обеспечения безопасности полетов является бортовая радиолокационная станция. Она устанавливается на всех магистральных ВС и представляет собой приемно-передающее устройство, обеспечивающее получение на экране индикатора условной картины местности, а также обнаружение ВС и очагов гроз.
Принцип действия БРЛС основан на способности электромагнитных волн высоких частот отражаться от объектов, находящихся на пути их распространения, с различной интенсивностью и направленностью. Благодаря автономности станция может применяться в полетах любой дальности, обеспечивая при этом постоянную точность измерения навигационных элементов. По виду измеряемых параметров БРЛС относится к угломерно-дальномерным средствам. На ВС гражданской авиации используется несколько типов БРЛС. Наибольшее распространение имеет станция «Гроза» различных модификаций.
Бортовые РЛС позволяют решать следующие задачи: вести ориентировку и определять место ВС по опознанным радиолокационным ориентирам (РЛО); определять угол сноса и путевую скорость; обнаруживать грозовые очаги и обходить их в безопасном направлении; предупреждать опасные сближения с другими ВС. Кроме того, при связи с ПНК РЛС позволяют корректировать счисленные координаты места ВС.
Режимы работы РЛС
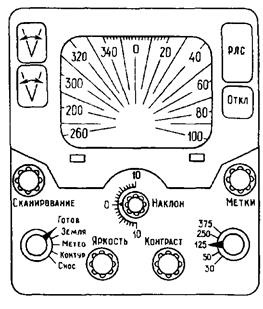 рис.19.1 Радиолокационная станция «Гроза» выпускается в нескольких модификациях. Для различных типов ВС она комплектуется приемопередатчиками и антенными блоками с определенными параметрами. На некоторых типах ВС предусмотрено дублирование основного приемопередатчика резервным. Кроме основного индикаторного блока, может устанавливаться дополнительный. Станция имеет следующие режимы работы: «Готов», «Земля», «Метео», «Контур» и «Снос». Нужный режим выбирает экипаж в зависимости от решаемой задачи. Управление станцией осуществляется с индикаторного блока (рис. 19.1).
рис.19.1 Радиолокационная станция «Гроза» выпускается в нескольких модификациях. Для различных типов ВС она комплектуется приемопередатчиками и антенными блоками с определенными параметрами. На некоторых типах ВС предусмотрено дублирование основного приемопередатчика резервным. Кроме основного индикаторного блока, может устанавливаться дополнительный. Станция имеет следующие режимы работы: «Готов», «Земля», «Метео», «Контур» и «Снос». Нужный режим выбирает экипаж в зависимости от решаемой задачи. Управление станцией осуществляется с индикаторного блока (рис. 19.1).
В РЛС «Гроза» используется индикатор с радиально-секторной разверткой. Для более полного иcпользования поверхности экрана индикатора начало развертки смещено вниз. Экран имеет большое послесвечение, благодаря которому обеспечивается одновременное наблюдение всего радиолокационного изображения. Для исключения смещения зоны обзора и искажений при изменении углов крена и тангажа в станции предусмотрена гиростабилизация антенны в плоскости горизонта от АГД-1 второго пилота. При этом положение стабилизированного луча по углу места можно изменять вручную в пределах ± 10°. При необходимости стабилизацию антенны можно вообще отключить с помощью выключателя «Стаб.— Откл.», расположенного в кабине экипажа.
Режим «Готов». Этот режим является режимом нагруженного резерва. В данном режиме станция после 3—5-минутного прогрева готова к немедленной работе. Высокое напряжение на передатчик в этом режиме не подается. Следует помнить, что даже при кратковременном выключении станции и последующем ее включении реле времени автоматически выдерживает указанное выше время прогрева. Поэтому в полете полностью выключать станцию не следует. Если нет необходимости в использовании станции, нужно перевести ее в режим «Готов».
Включение станции производят перед вылетом в такой последовательности: устанавливают переключатель режимов работы в положение «Готов»; переключатель «Стаб.— Откл.» в положение «Стаб.»; включают АЗС «Гроза» на щитке АЗС; включают авиагоризонт АГД-1 второго пилота; нажимают клавишу «РЛС» на ПУ. При этом на индикаторе загорается лампа подсвета, сигнализирующая о включении электропитания. Через 3—5 мин после включения станции проверяют ее работоспособность. Передатчик РЛС включают на предварительном (исполнительном) старте, выключают по окончании полета перед выходом ВС на предпосадочную прямую.
Применение РЛС в режиме «Земля». Данный режим предназначен для обзора земной поверхности, периодического определения места ВС и путевой скорости. Обзор земной поверхности обеспечивается в переднем секторе в пределах +100° от продольной оси ВС.
Для работы станции в режиме «Земля» необходимо: установить переключатель режимов работы в положение «Земля»; переключатель масштабов в положение нужного масштаба развертки; ручкой «Наклон» добиться наиболее четкого изображения на экране; ручкой «Яркость» отрегулировать требуемую яркость изображения. Для правильного пользования ручками «Наклон» и «Яркость» следует знать, что для просмотра более удаленных от ВС РЛО необходимо яркость несколько увеличивать, а антенну поднимать. При наблюдении близко расположенных ориентиров от ВС антенну следует опускать, а яркость уменьшать; ручкой «Контраст» добиться контрастности требуемых отметок на общем фоне радиолокационного изображения; ручкой «Метки» отрегулировать яркость меток дальности, соответствующую условиям полета; сличить полученное радиолокационное изображение местности с картой в районе предполагаемого местонахождения ВС и опознать наблюдаемые на экране ориентиры.
Преимуществом БРЛС перед визуальной ориентировкой является возможность точного определения углового положения ориентиров относительно ВС и дальности до них.
Определение курсовых углов и дальностей до ориентиров. Положение ориентира на экране индикатора определяется курсовым углом ориентира (КУО) и наклонной дальностью (НД) от ВС до ориентира. КУО отсчитывают по шкале, которая нанесена по краю экрана и оцифрована от  до
до  cи от
cи от  до . Кроме шкалы, на экране нанесены радиальные линии через 10° (см. рис. 19.1), облегчающие определение КУО и повышающие точность его отсчета. В верхней части шкалы в секторе ±20° имеется дополнительная градуировка через 2 °, которая в основном используется при измерении УС.
до . Кроме шкалы, на экране нанесены радиальные линии через 10° (см. рис. 19.1), облегчающие определение КУО и повышающие точность его отсчета. В верхней части шкалы в секторе ±20° имеется дополнительная градуировка через 2 °, которая в основном используется при измерении УС.
Точность измерения КУО характеризуется средней квадратической погрешностью 1,1 —1,5° в случае отсчета угла в момент прихода отметки на радиальную линию и 1,4—1,7 0 при интерполяции положения отметки между радиальными линиями.
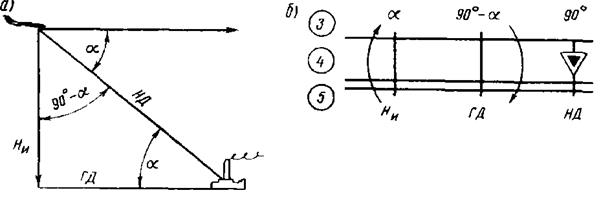
Наклонная дальность — расстояние по наклонной линии от ВС до ориентира (рис. 19.2, а). Ее определяют по экрану индикатора по меткам дальности, расстояние между которыми зависит от используемого масштаба развертки. На масштабах развертки 30 и 50 км метки дальности формируются через 10 км, на масштабе 125 км через 25 км и на масштабах 250 и 375 км через 50 км. На масштабе 375 км развертка начинается с дальности 200 км,
Рис 19.2
т.е. имеется задержка начала развертки, которую следует учитывать при определении НД до ориентиров. Для определения НД необходимо отсчитать число меток дальности на экране до наблюдаемого ориентира и умножить на расстояние между ними. Если ориентир находится между метками, то НД определяют глазомерной интерполяцией.
Точность определения НД оценивается СКП, равной  , где
, где  — расстояние между метками дальности. В БРЛС «Гроза» =10 км; 25 и 50 км. Следовательно, при пользовании 10-километровыми метками дальности
— расстояние между метками дальности. В БРЛС «Гроза» =10 км; 25 и 50 км. Следовательно, при пользовании 10-километровыми метками дальности  =1 км, 25-километровыми — = 2,5 км, 50-километровыми — = 5 км. В тех случаях, когда НД измеряют в момент прихода отметки ориентира на метку дальности, точность измерения значительно повышается. При этом СКП
=1 км, 25-километровыми — = 2,5 км, 50-километровыми — = 5 км. В тех случаях, когда НД измеряют в момент прихода отметки ориентира на метку дальности, точность измерения значительно повышается. При этом СКП  в зависимости от используемого масштаба развертки. Поэтому для более точного определения НД, когда это возможно, ее отсчет следует производить в момент совмещения изображения ориентира с меткой дальности.
в зависимости от используемого масштаба развертки. Поэтому для более точного определения НД, когда это возможно, ее отсчет следует производить в момент совмещения изображения ориентира с меткой дальности.
Для выполнения некоторых расчетов требуется знать не наклонную, а горизонтальную дальность (ГД). Если НД> 5 Н полета, то практически НД = ГД. Когда НД<5 Н, то ее при необходимости пересчитывают на НЛ (рис. 19.2, б) в ГД по формуле  .
.
Применение станции в режиме «Снос». Этот режим предназначен для измерения УС. Принцип измерения основан на использовании эффекта Доплера, сущность которого заключается в изменении частоты принимаемых сигналов по сравнению с частотой излучаемых сигналов, когда между передатчиком и приемником имеется относительное движение. Если рассматривать эффект Доплера применительно к БРЛС, то приращение частоты принимаемых сигналов, отраженных от земной поверхности, будет зависеть от W и угла, под которым диаграмма излучения антенны станции расположена к ЛФП ВС.
При включении режима «Снос» автоматическое сканирование антенны прекращается, и она подключается к ручному управлению по азимуту с помощью клавиш, расположенных на индикаторном блоке. Угол поворота антенны относительно продольной оси ВС отсчитывают на экране индикатора по шкале курсовых углов. Чтобы измерить УС, необходимо электрическую ось диаграммы направленности точно совместить с ЛФП (вектором W). Положение антенны относительно ЛФП легко воспринимается глазом по виду линии развертки на экране индикатора. Когда антенна РЛС установлена под произвольным углом к направлению ЛФП, частоты отраженных сигналов от левой и правой границ луча диаграммы направленности будут неодинаковыми. В результате сложения принятых сигналов возникают биения, которые модулируют электронный луч линии развертки, что приводит к ее мерцанию с большой частотой. При этом яркие точки на линии развертки кажутся быстро перемещающимися.
При совмещении оси диаграммы направленности антенны с ЛФП частоты отраженных сигналов от левой и правой границ луча станут одинаковыми. Происходит это благодаря симметричному расположению лучей относительно ЛФП. Однако вследствие того, что в приемник поступает одновременно бесчисленное множество сигналов, отраженных от различных точек облучаемого участка земной поверхности, суммарный сигнал практически будет иметь биения малой частоты. Это приводит к уменьшению до минимума частоты яркостной модуляции линии развертки. При этом яркие отметки становятся почти неподвижными. Следовательно, наблюдая за линией развертки, можно по минимальной частоте ее мерцания подобрать такое положение антенны, когда ось диаграммы совпадает с ЛФП. Антенна окажется развернутой на угол, соответствующий УС.
Порядок измерения УС следующий: в режиме «Земля» на масштабе 50 км добиться четкого и равномерного по всей длине развертки изображения отраженных сигналов; переключить РЛС в режим «Снос», попеременно нажимая на клавиши ручного управления движением антенны по азимуту, добиться перемещения линии развертки в такое положение, где частота мерцания ее будет наименьшей (скорость перемещения линии развертки изменяется ручкой «Сканирование»); отсчитать УС по шкале курсовых углов, програ-дуированной через 2°, против линии развертки. При отклонении линии развертки вправо от нуля шкалы УС имеет знак «плюс», при отклонении влево — знак «минус». Для большей точности выполнить два-три измерения и осреднить отсчеты. Точность измерения УС данным способом над равнинной и холмистой местностями характеризуется  =1 °, в горной местности точность значительно ниже. При полете над морем УС можно измерить только при неспокойной его поверхности.
=1 °, в горной местности точность значительно ниже. При полете над морем УС можно измерить только при неспокойной его поверхности.
Режимы «метео» и «контур» рассмотрим в следующем вопросе